Set intermediate waypoints
The DeltaQuad EVO will proceed to these waypoints, continuing in Aerodynamic mode.
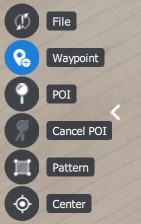
To plan mission items such as regular waypoints select the Waypoint Tool
 from the Plan Tools on the left side of the screen.
from the Plan Tools on the left side of the screen.
Click anywhere on the map to designate a location for the waypoint.

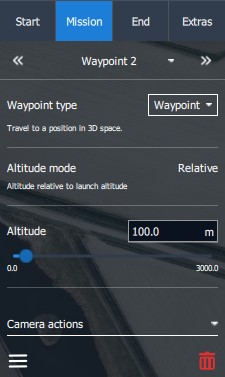
After placing the waypoint on the map, the Mission tab in the Plan Item Selector on the right side of the screen will open.
Plan View mission items
Choose and set up the desired mission item from the Waypoint type tab.
When AMC is used in Normal Mode three options are available.
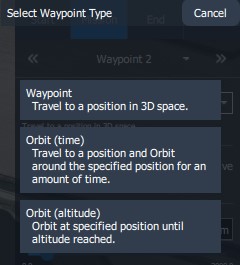
Waypoint type - Waypoint
The vehicle flies toward the location and altitude specified by the user. Once it arrives, it will proceed to the next mission item. If there are no further mission items following the Waypoint, the vehicle will orbit at the Waypoint's location.
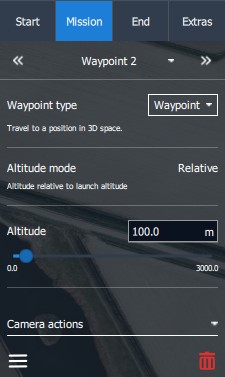
The Altitude mode is the altitude above the launch elevation.
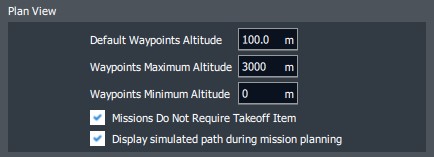
Set the altitude for the waypoint with the altitude slider.

The default range can be changed in the Application Settings. Settings>General>Plan View>Waypoints Maximum Altitude
When changing the altitude of a waypoint, the next waypoint's altitude is automatically set to that value.
Waypoint type - Orbit (time)
The vehicle flies toward the location and altitude specified by the user. Once it arrives, the vehicle will initiate an orbit and continue to circle that position. When the specified Orbit Time elapses, it will proceed to the next mission item.
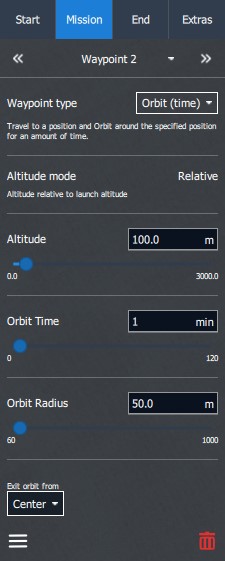
The Altitude mode is the altitude above the launch elevation.
Set the altitude for the waypoint with the altitude slider.
Set the duration of how long the DeltaQuad EVO should orbit at the designated location.
Set the radius of the Orbit. We recommend a minimum radius of 100m. 75m is possible in calm winds.

Choose the vehicle's exit point from the Orbit.
At the bottom of the Mission tab, you can edit the position of the mission item, or delete it.
If the vehicle's altitude differs from the altitude of the next mission item, the vehicle will fly in a straight line toward that mission item.
The vehicle will not ascend or descend immediately to the altitude of the next mission item before reaching it.
If the vehicle can't reach the altitude of the next mission item due to an insufficient climb or descent rate, the vehicle will orbit at the location of the mission item to finish climbing or descending to the item's altitude.
Waypoint type - Orbit (altitude)
The vehicle flies toward the location at its current altitude. Once it arrives, the vehicle will initiate an orbit and start climbing or descending to the user-specified altitude. When the altitude is reached, the vehicle will continue to the next mission item.
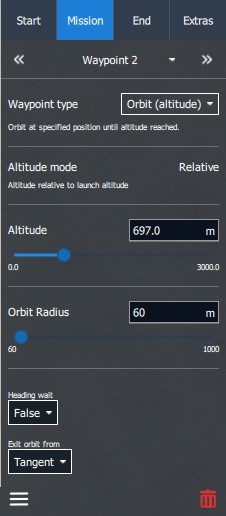
The Altitude mode is the altitude above the launch elevation.
Set the altitude for the waypoint with the altitude slider.
Set the radius of the Orbit. We recommend a minimum radius of 100m. 75m is possible in calm winds.
Choose the vehicle's exit point from the Orbit.
At the bottom of the Mission tab, you can edit the position of the mission item, or delete it.
When using Orbit (altitude), the operator must be especially cautious about terrain collisions.
Orbit (altitude) is practical for reaching a desired altitude before the flight path continues or when the vehicle's climb or descent rate will not be sufficient to reach the required altitude en route.