This section will describe in detail the functionality of every available payload for the DeltaQuad EVO.
Field-proven stabilized cameras for commercial, industrial, and security applications.
This section will discuss how to install, set up, and use all NextVision payloads.
This section describes how to connect a second screen to your DeltaQuad Controller.
The second screen function can stream the video feed to a local device.
The DeltaQuad Controller provides an RTSP-based video stream. The second screen will connect to the DeltaQuad Controller, not directly to the UAV. This is to prevent the UAV from having to use double the amount of bandwidth.
The video feed displayed on the second screen is the direct video feed from the camera.
If your controller is connected to a 5GHz WiFi network or hotspot, a second device can connect to the same network. For information on how to connect the DeltaQuad Controller to a WiFi network or hotspot, please see the .
In order to stream the video feed locally to a second screen you need:
The "IP address" of the DeltaQuad Controller.
(recommended software) for viewing the video stream on the second screen device. The VLC Media Player is cross-platform compatible and can be installed on many devices.
The DeltaQuad Controller and the second screen device need to be connected to the same Wi-Fi network or hotspot.
In order to ground-test the setup and check the video feed it is necessary to power the DeltaQuad Evo and establish a radio connection between the Evo and the DeltaQuad Controller.
When ground-testing the video feed with an infrared-capable camera it is important to provide active cooling. We recommend a USB fan pointed directly towards the camera.
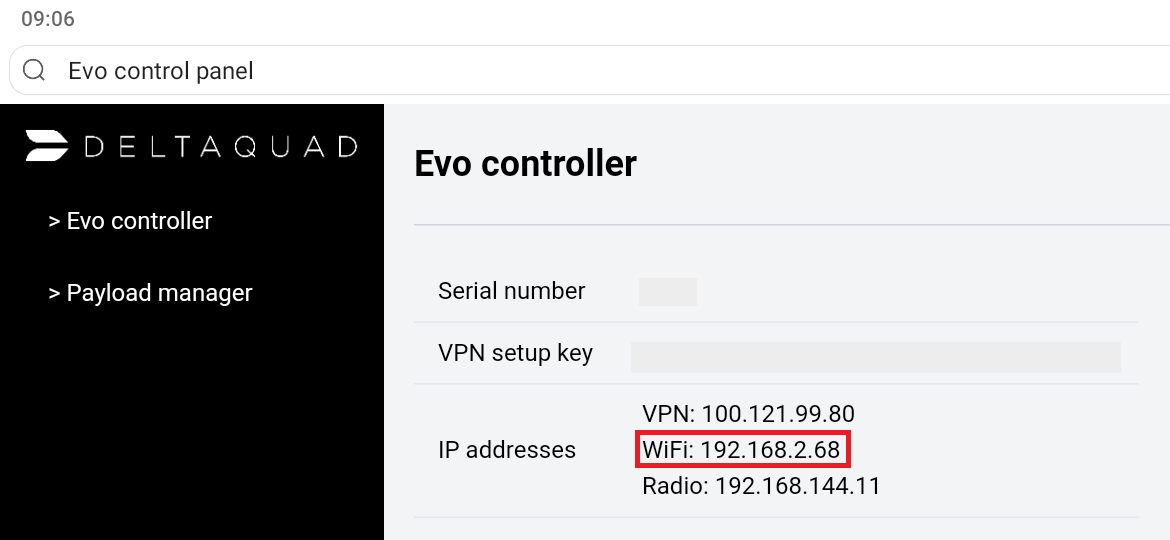
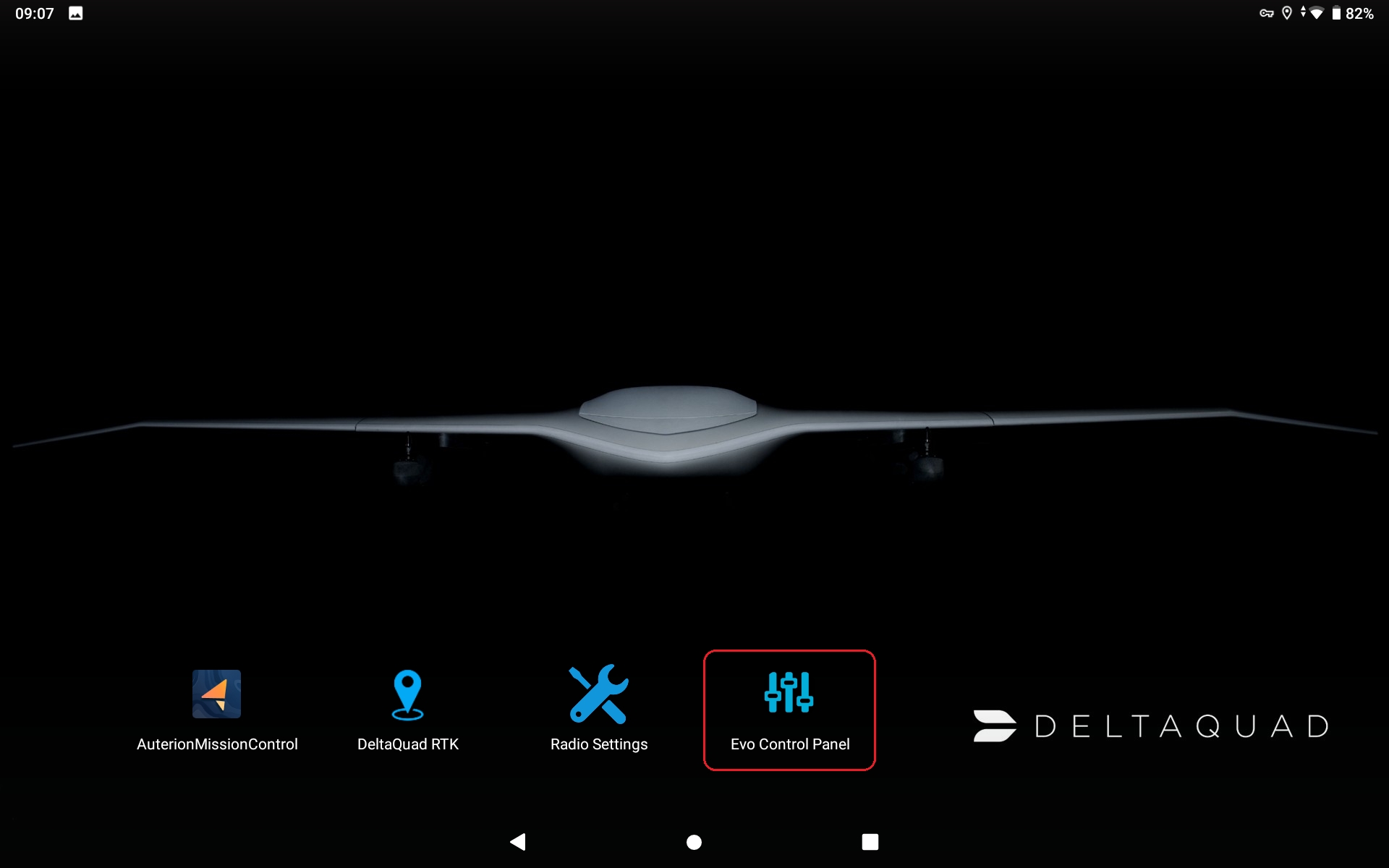
Once the DeltaQuad Controller is connected to the Wi-Fi network or hotspot you can determine the "Wi-Fi IP address" that was assigned to the DeltaQuad Controller by opening the Evo Control Panel.
Here you will find the Wi-Fi IP address which shows the values for the IP address assigned by the Wi-Fi network or hotspot. The value required is the sequence of 4 numbers separated by a dot, in our example: 192.168.2.68
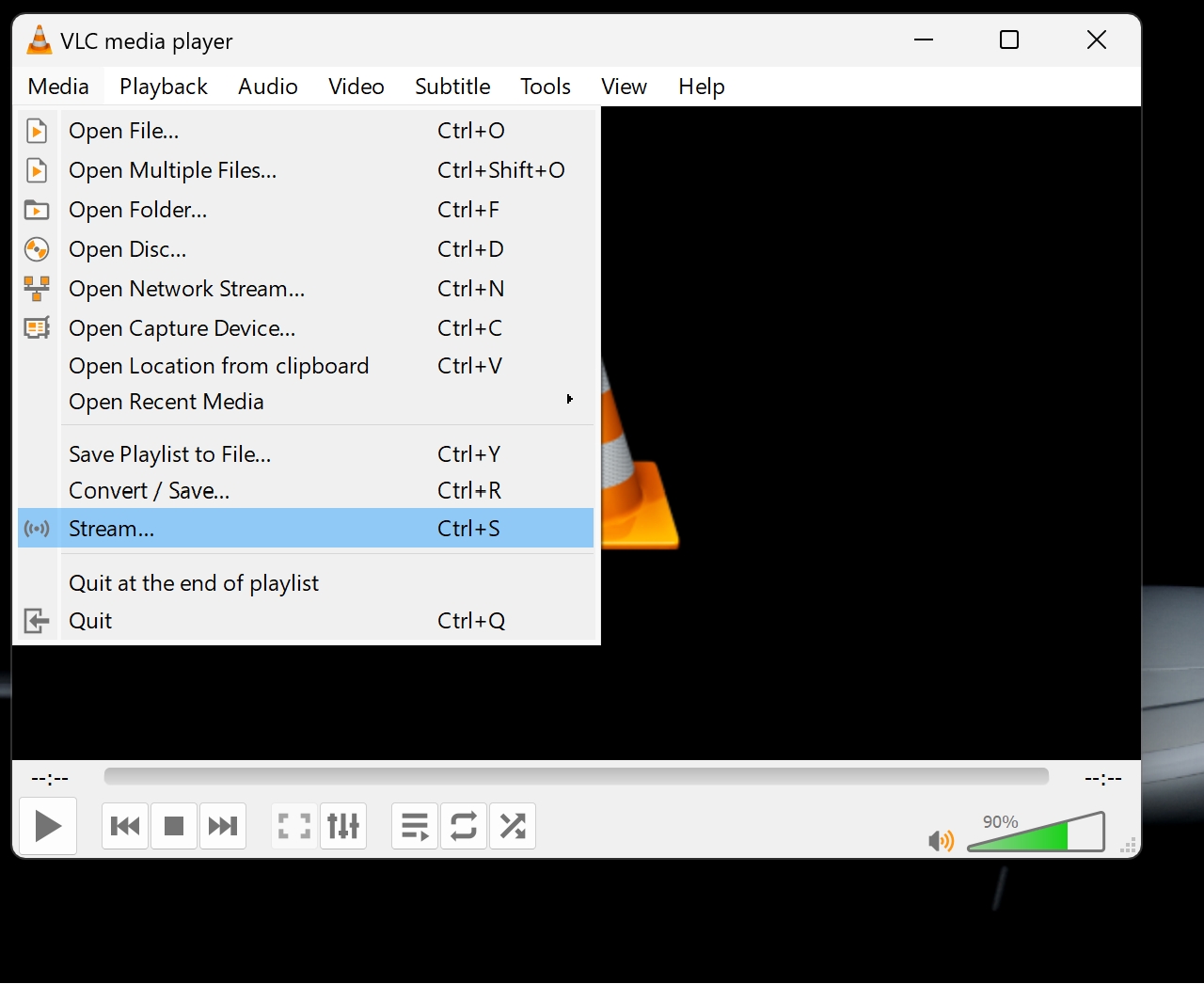
Go to "Media" and open the "Stream..." function.
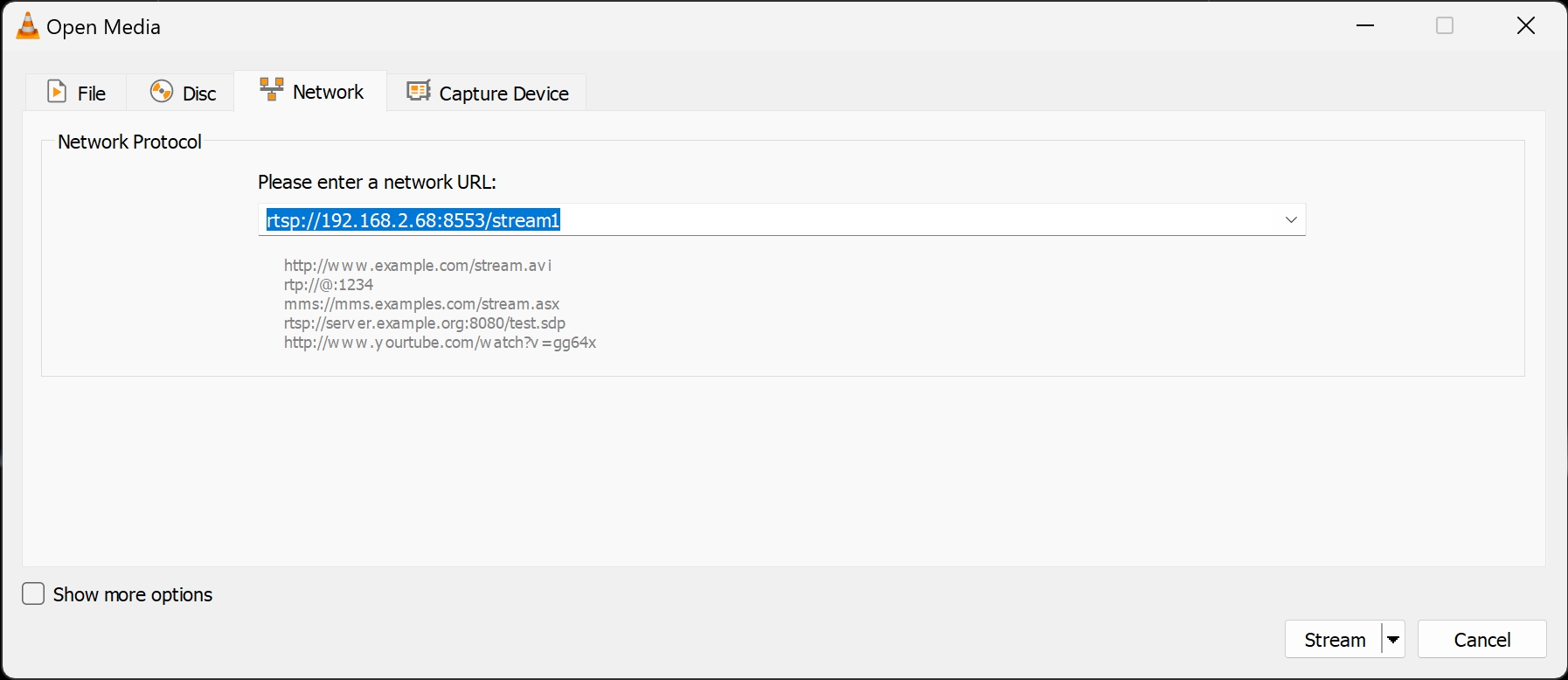
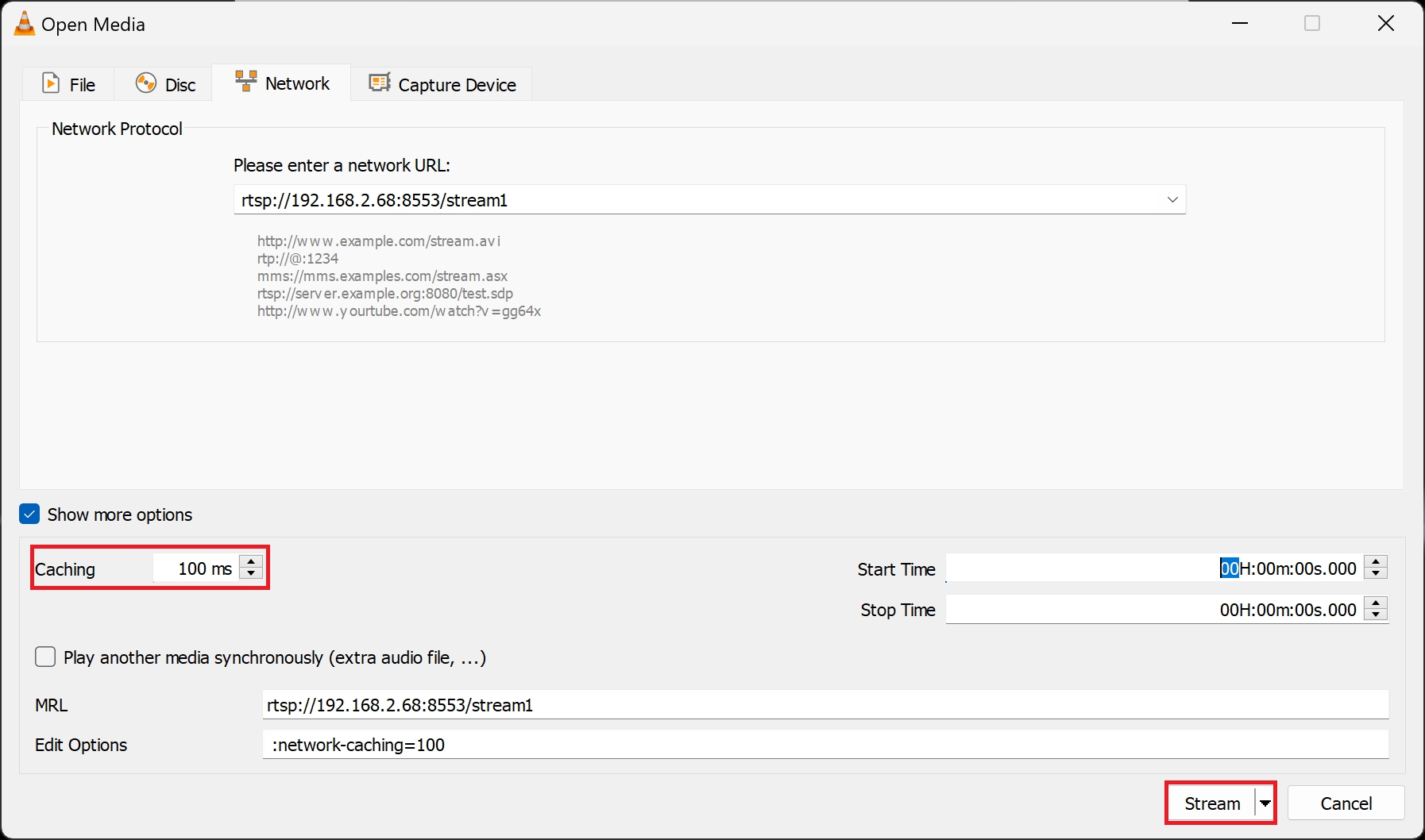
Go to the "Network" tab.
In the "network URL" field enter the following address:
In our example, it is rtsp://192.168.2.68:8553/stream1.
Check "Show more options" and set the value for "Caching" to 100ms. Click on "Stream" in the lower right corner of the window.
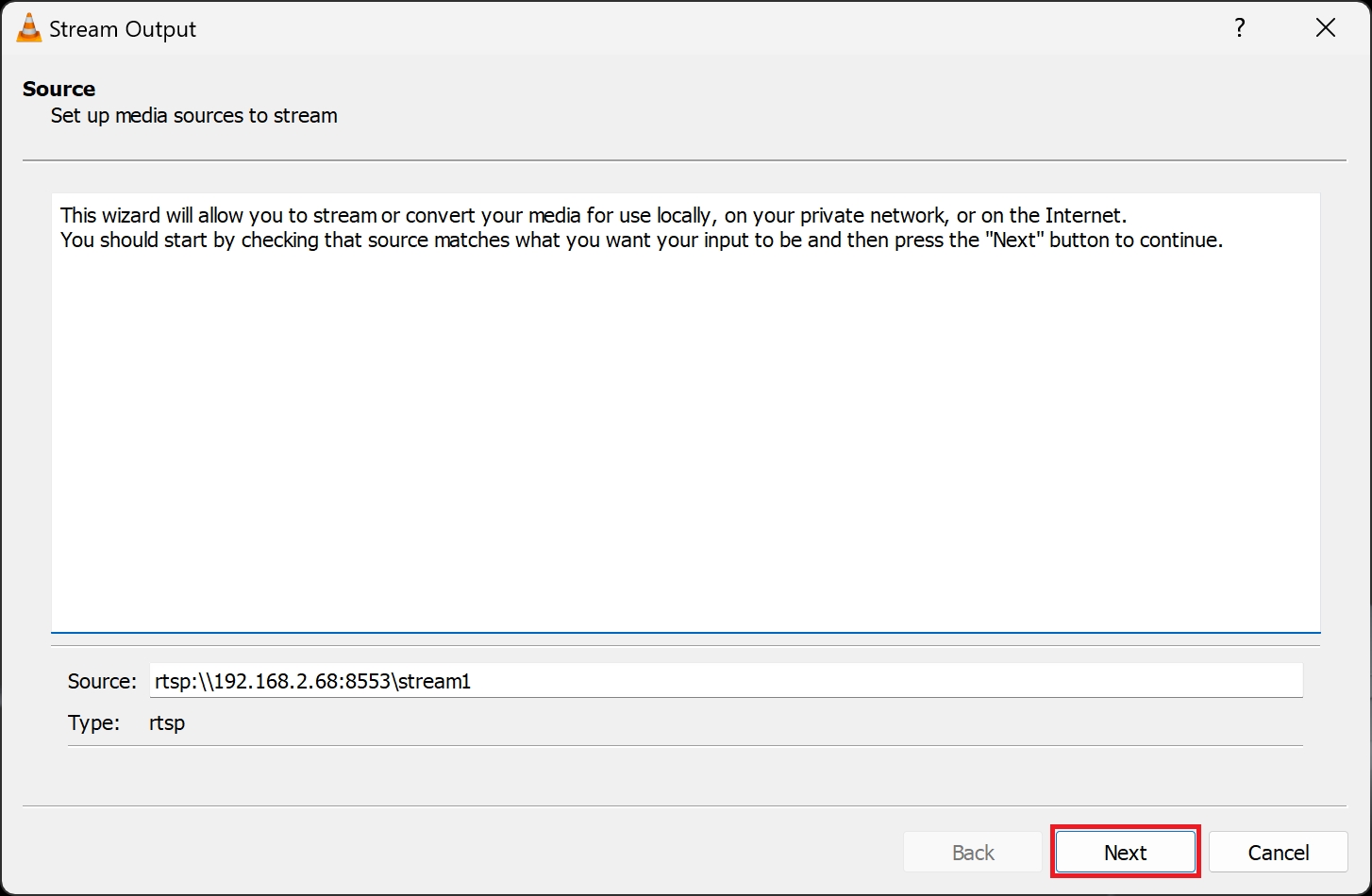
Click "Next" in the "Source" window.
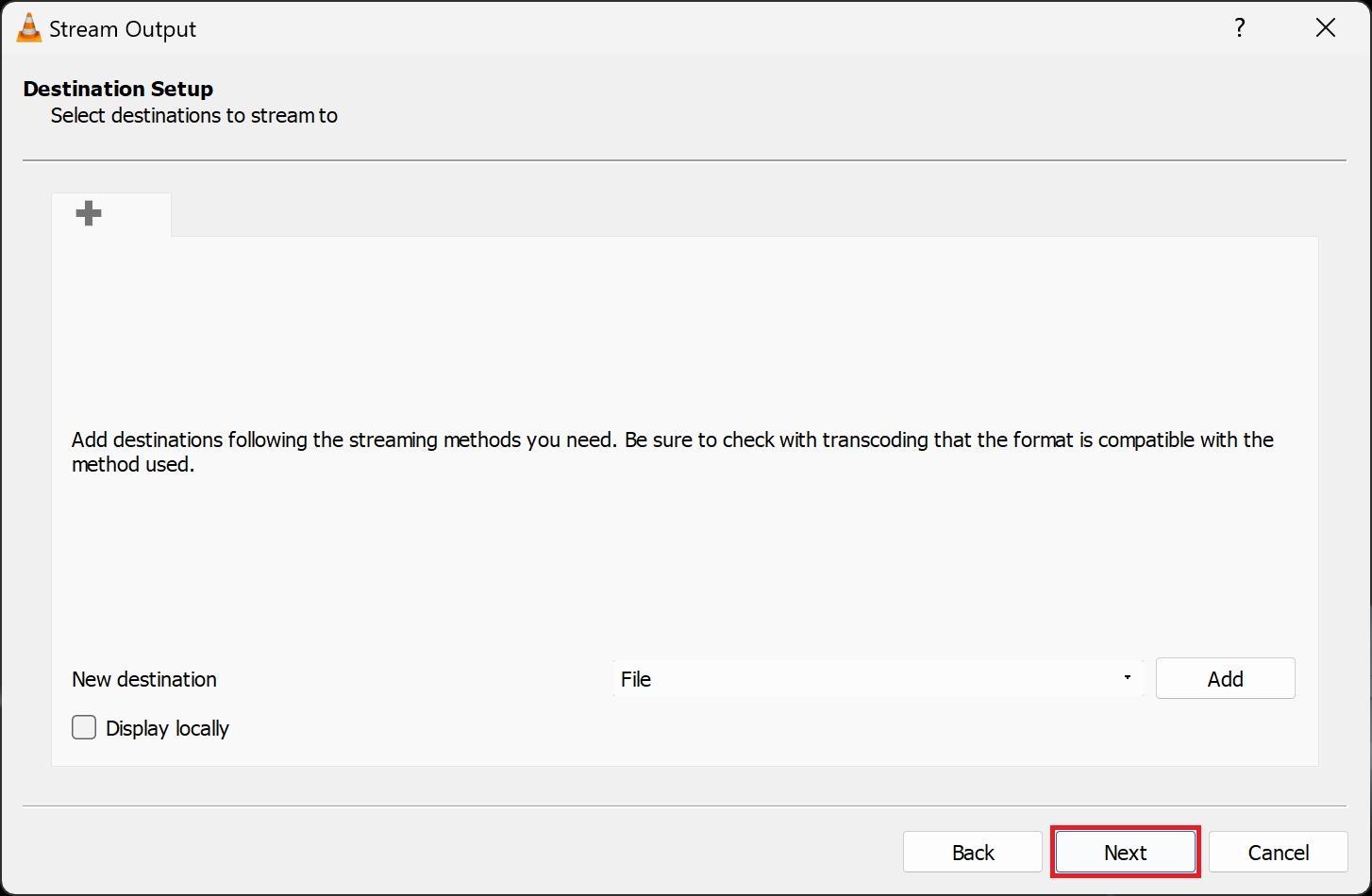
Click "Next" in the "Destination Setup" window.
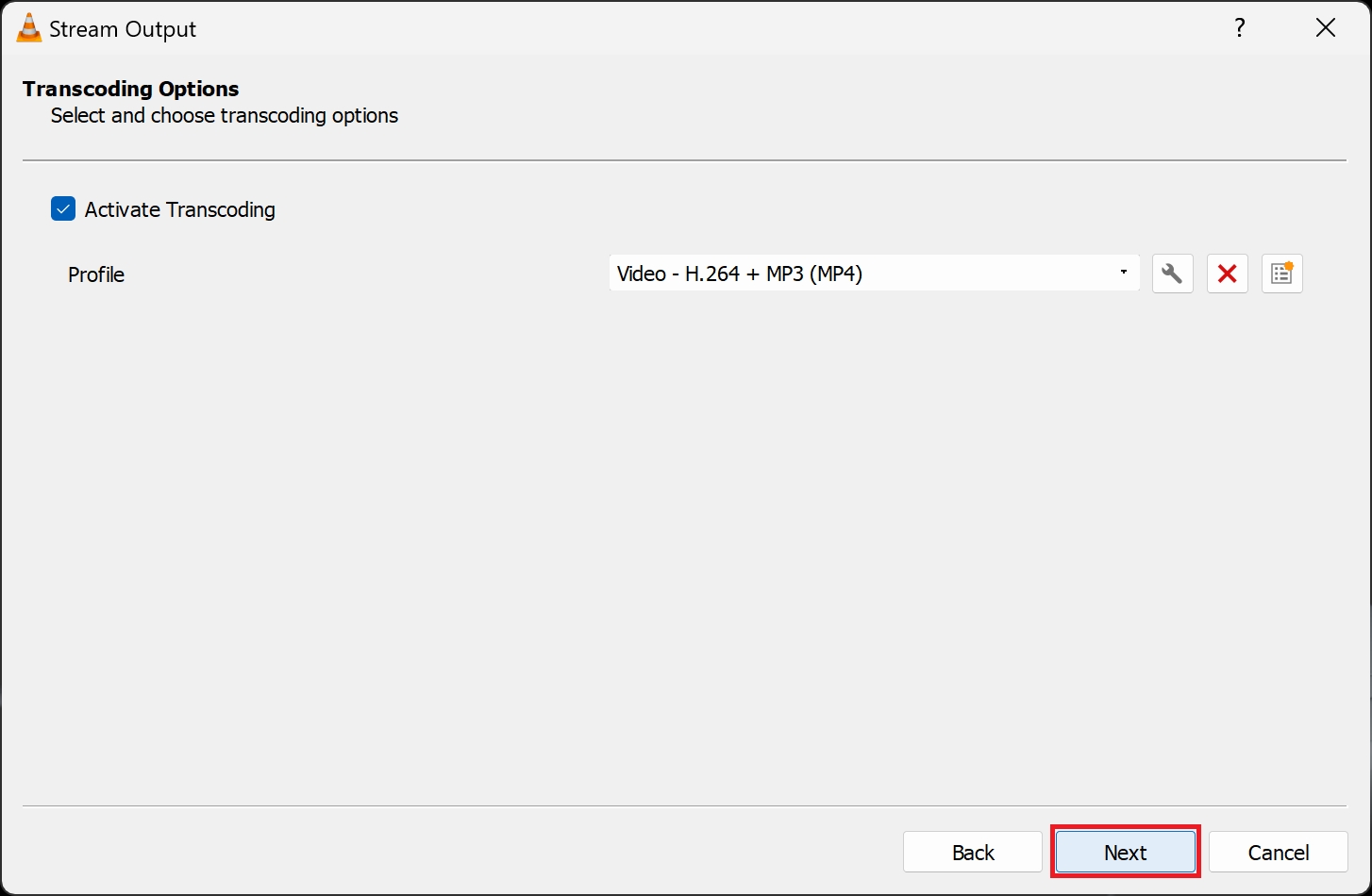
Click "Next" in the "Transcoding Options" window.
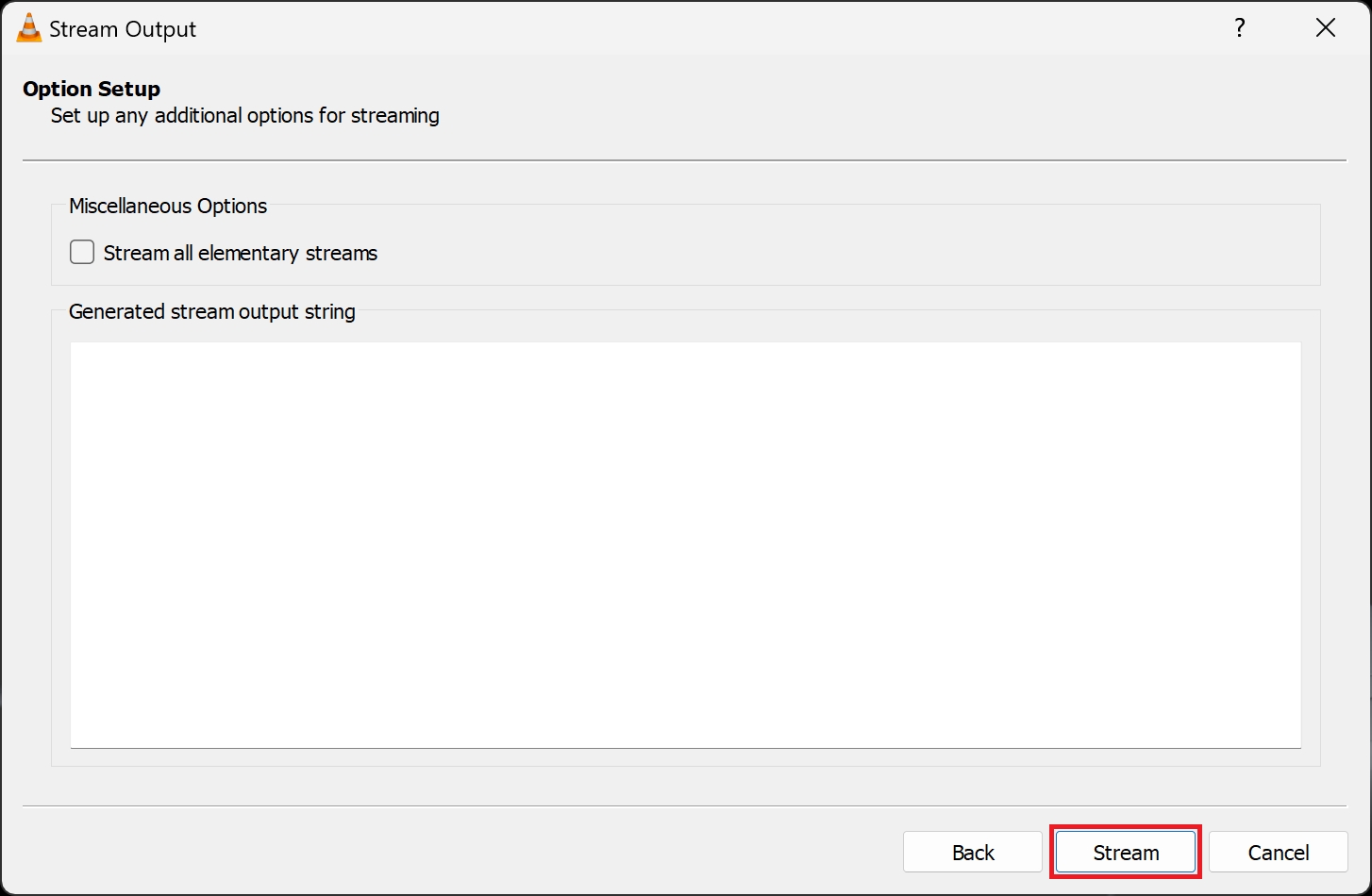
Click "Stream" in the "Option Setup" window.
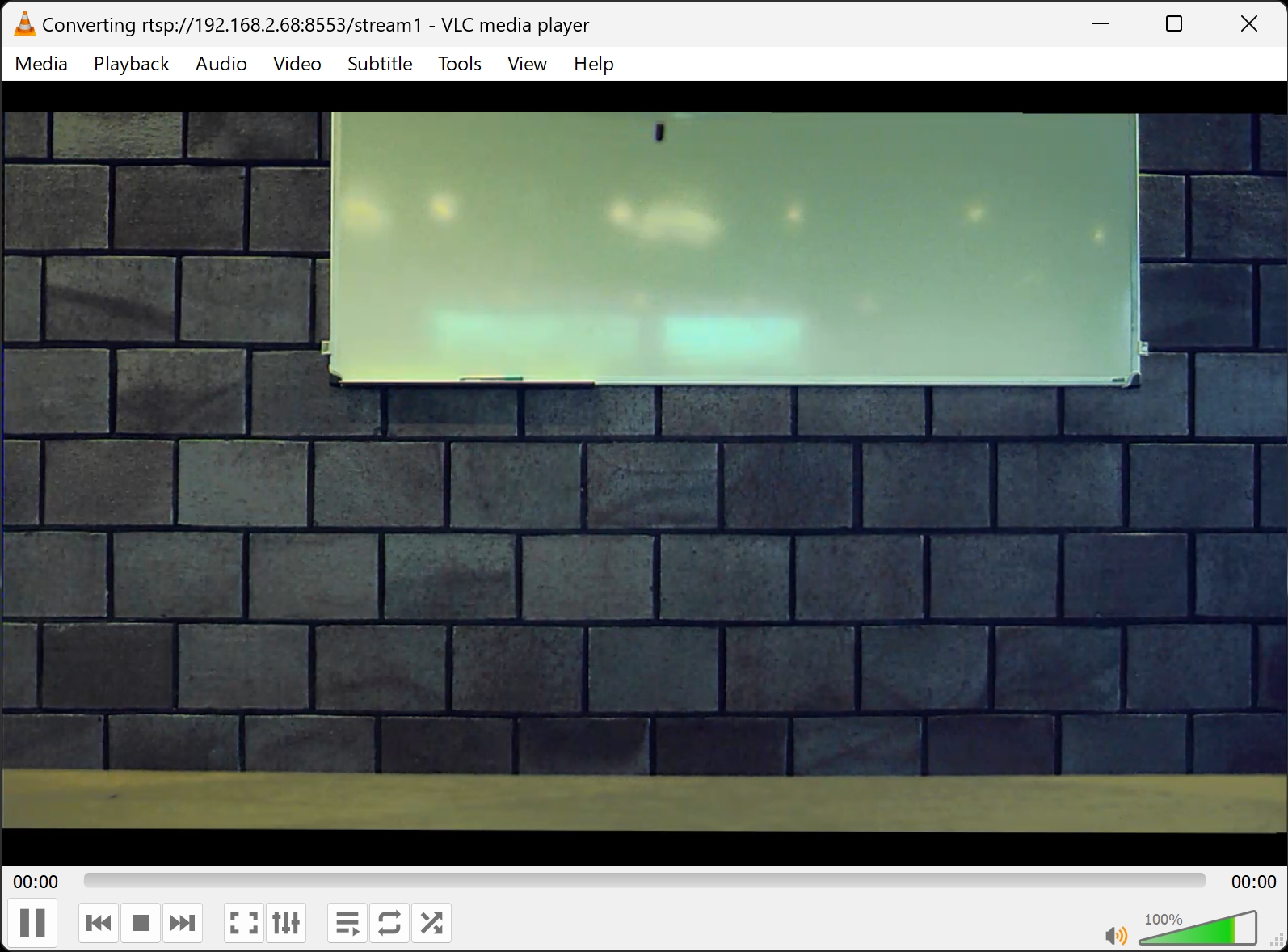
After a few seconds, the video feed should appear in the VLC Media Player.
RGB AND THERMAL - Single payload
The NightHawk2 is an EO/IR stabilized camera with a mere weight of 250 grams. The NightHawk2 delivers powerful thermal observation alongside long-range visible imagery.
The NightHawk2-V is a small-size dual EO-IR stabilized camera turret enabling long-range observation. Implementing technology breakthroughs makes the NightHawk2-V the best camera in its weight class.
NightHawk2-UZ is a dual EO-IR stabilized camera turret crafted for long-range observation applications that demand very low weight. Embodying technology innovations, NightHawk2-UZ provides unmatched capabilities.
When the DeltaQuad Evo and the Ground Control Station are powered and connected the video feed will be visible in AMC either in the main screen or in the small video screen in the bottom-left section of the FLY view. You can switch the main screen between the satellite map and video feed by tapping on the small screen in the bottom-left corner.
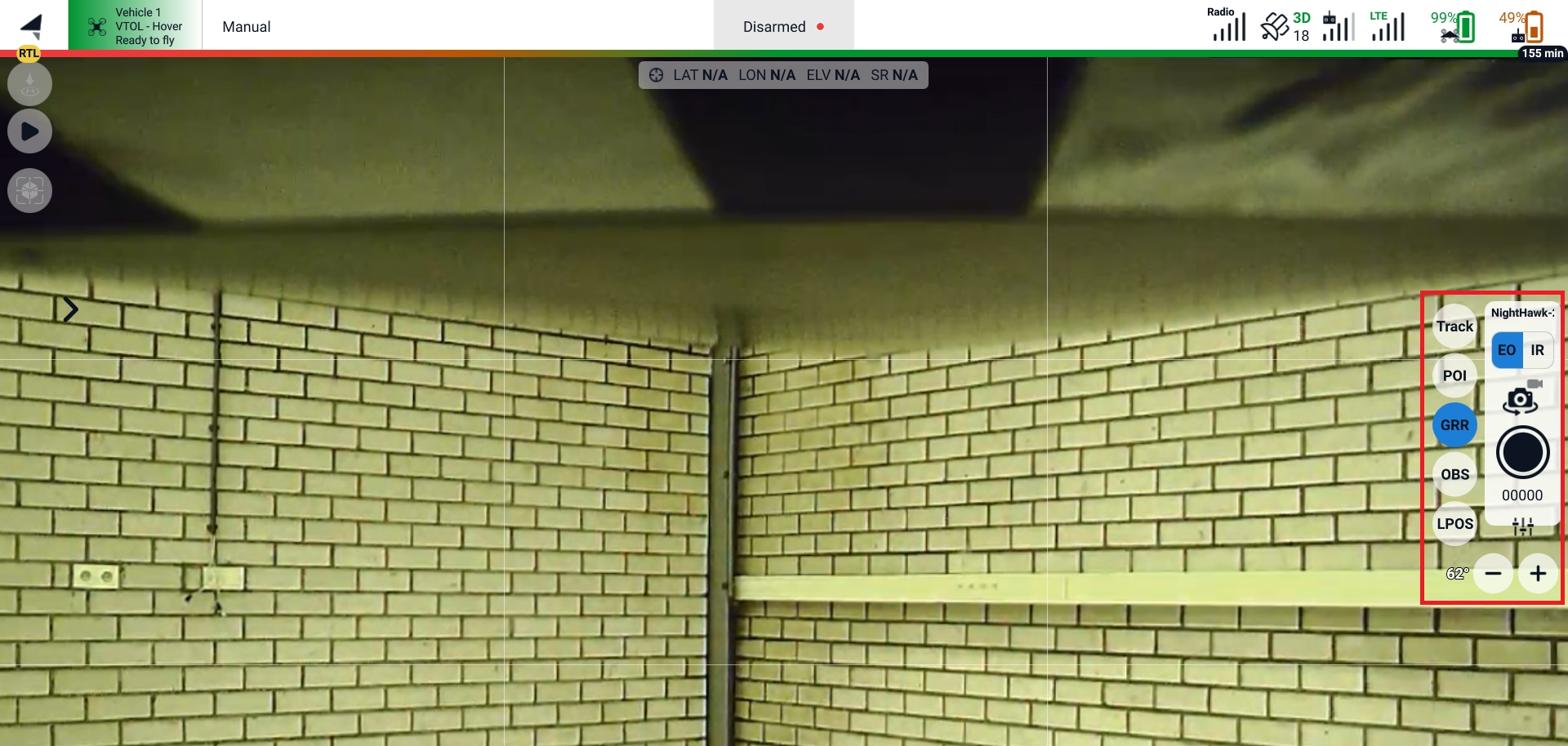
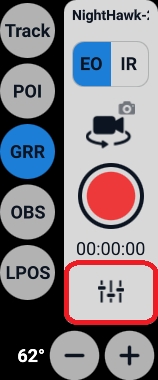
On the right side of the fly screen, the camera controls are displayed. These controls allow you to change the mode of the camera system.
The camera controls window allows you to set the following camera modes:
Target tracking is the mode where the camera will remain focused on a target. The target can be moving or static. Activate target tracking by tapping on the Track button. Simply tap anywhere in the video feed and the camera will enter tracking mode and track the target that was tapped on. You can tap several times to fine-tune your target tracking mode.
When a target is being tracked, a white square is displayed on the object that is being tracked. By moving the camera joystick, tracking is disabled and the camera returns to the previous mode.
When clicking on the camera symbol the recording mode can be switched between photo and video recording.
The red button indicates the video recording mode.
The black button indicates the photo recording mode.
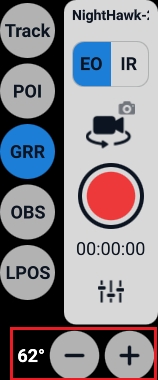
The -/+ button controls the zoom of the camera. The zoom level is indicated by degrees.
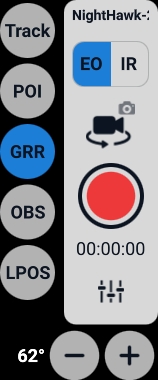
The fader button opens the camera menu with access to camera settings and general settings.
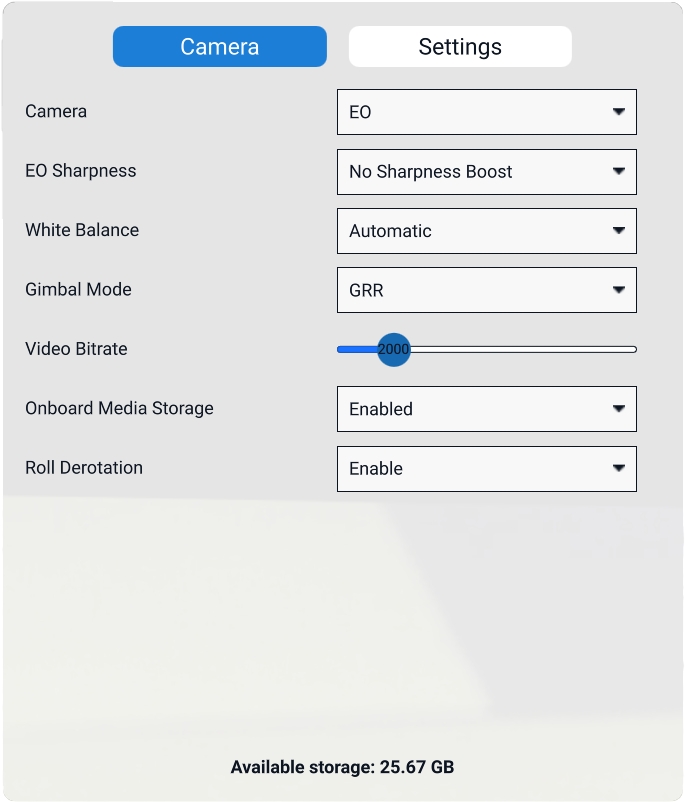
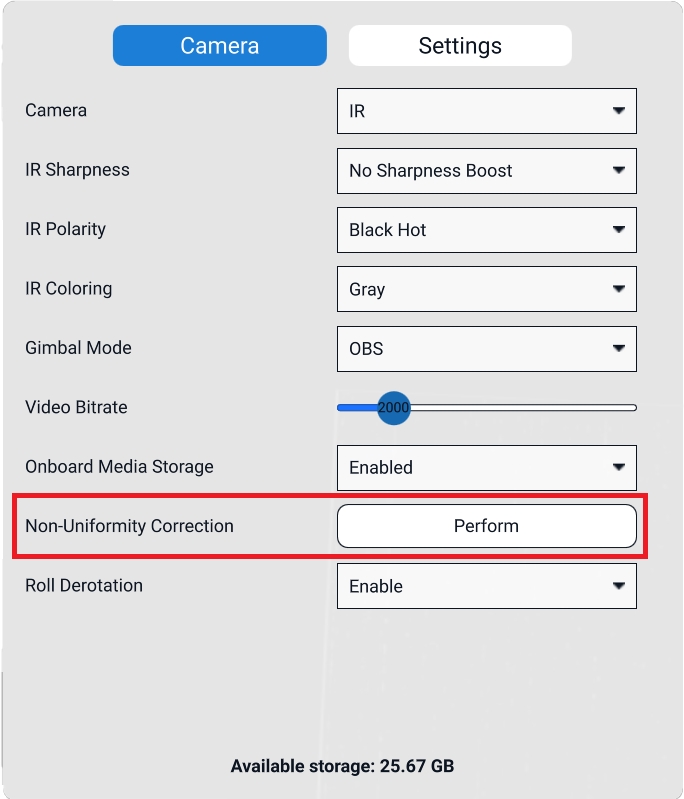
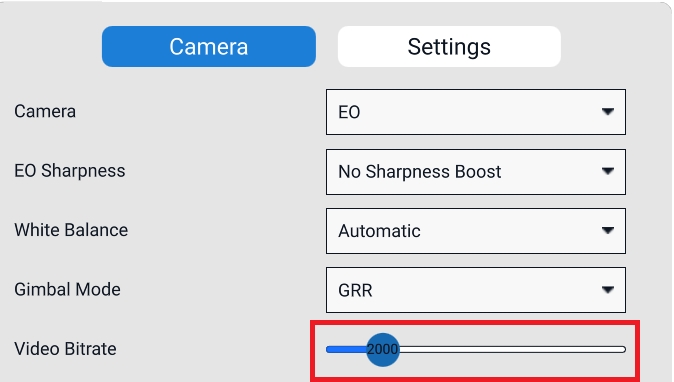
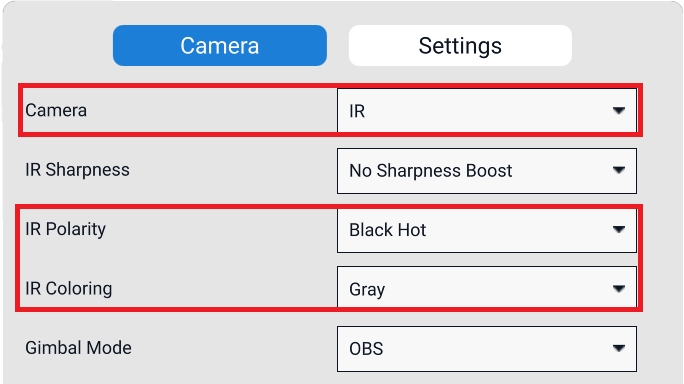
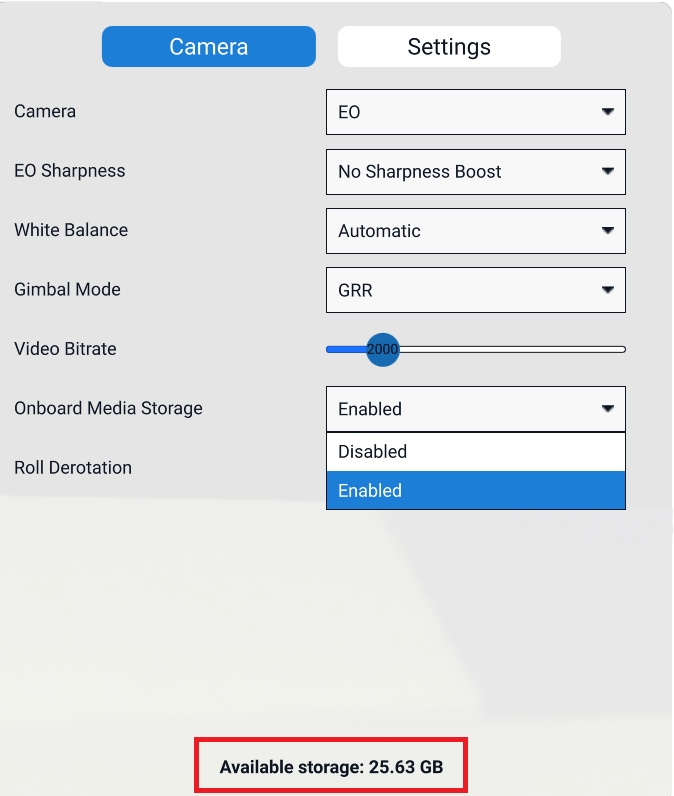
The camera settings tab gives access to the following options:
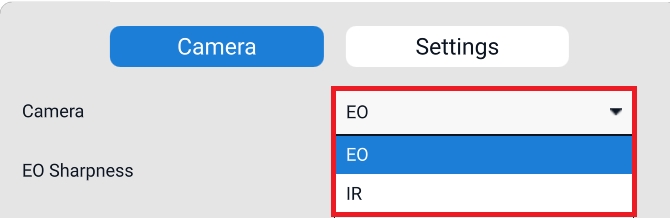
Camera: Switch between EO and IR mode. This mode can be also accessed via the camera controls in the Fly view.
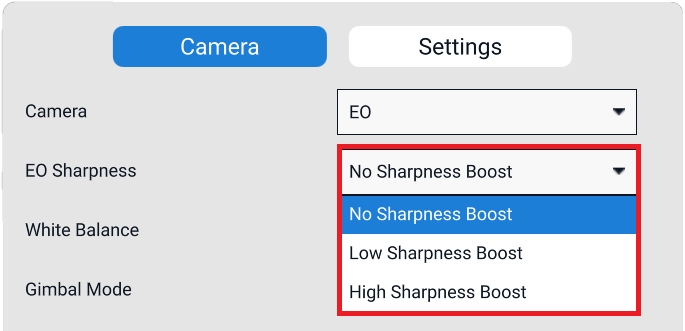
EO Sharpness: This option gives three different degrees to boost the sharpness of the image.
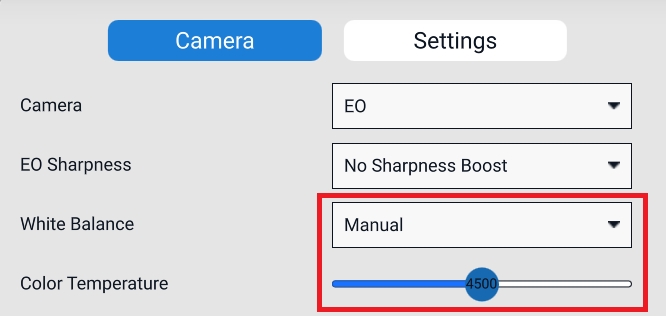
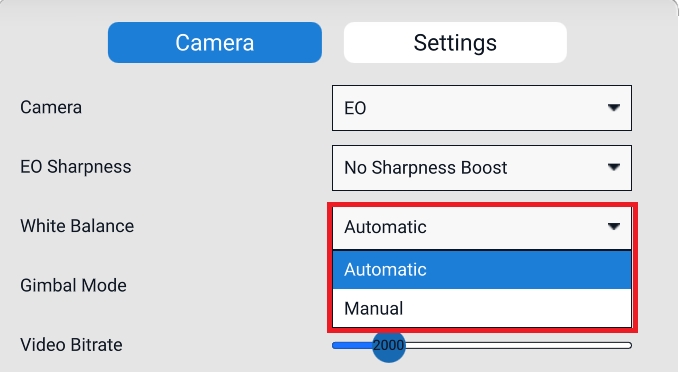
White Balance: Switch between Automatic and Manual mode.
When White Balance is set to Manual a slider appears to set the white balance manually:
When IR is chosen as the camera mode more options will be available for this mode:
IR Polarity: In this tab, the operator can choose to have either Black Hot or White Hot.
IR Coloring: In this tab, the operator can choose between the Gray scale or the Color scale.
Non-Uniformity Correction: (NUC) After engaging the IR mode, the IR camera needs to be calibrated for a clear view. This is done automatically by the system. NUC performs this calibration which takes about 3 seconds.
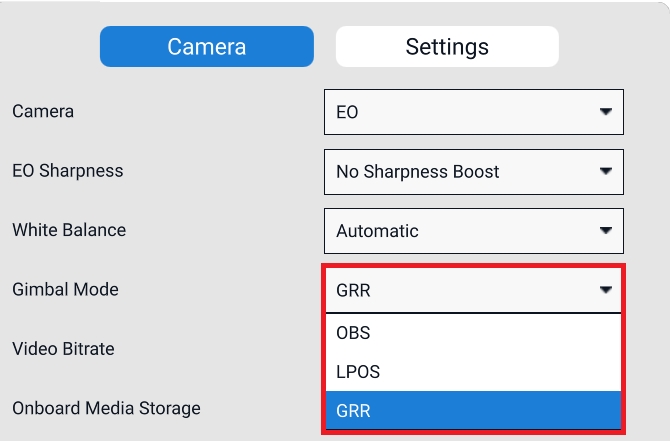
Gimbal Mode: In this tab, the operator can switch between GRR, OBS, and LPOS gimbal modes. These camera control options are also available in the Fly view via the camera controls.
Video Bitrate: With this slider the video bitrate can be set. By default, the value is set to 2000. The higher the bitrate the better the video image will be but at the cost of the maximum telemetry distance.
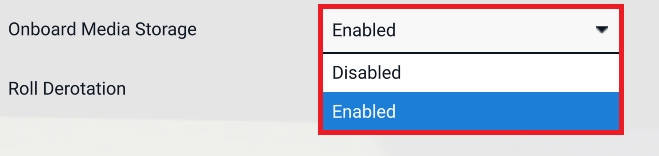
Onboard Media Storage: With this option, you can enable or disable the Onboard Media Storage.
At the bottom of the window, the available storage for video recording will be displayed.
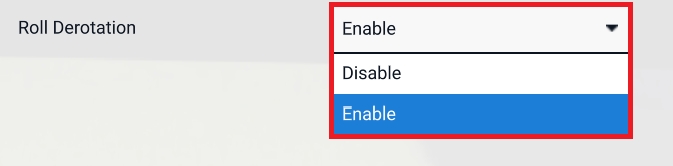
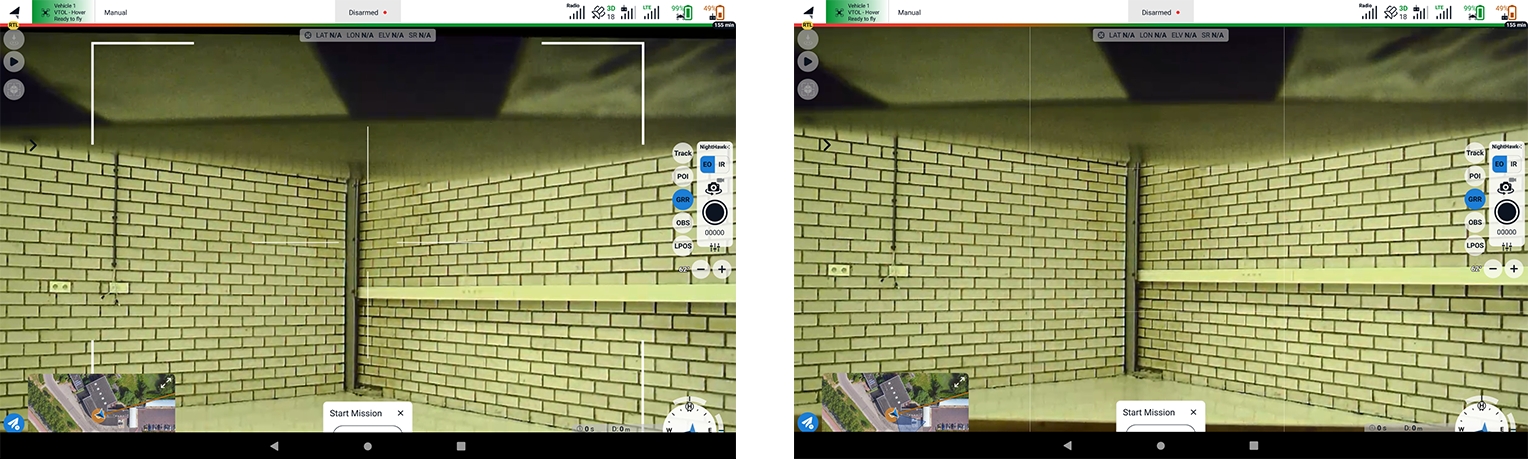
Roll Derotation: The camera is capable of keeping the video stream aligned with the horizon when the vehicle is banking. This is called Roll Derotation.
When roll derotation is active the video image displayed on the controller will rotate in such a way that the image remains level. The trade-off is that the video can show black corners when the vehicle is banking.
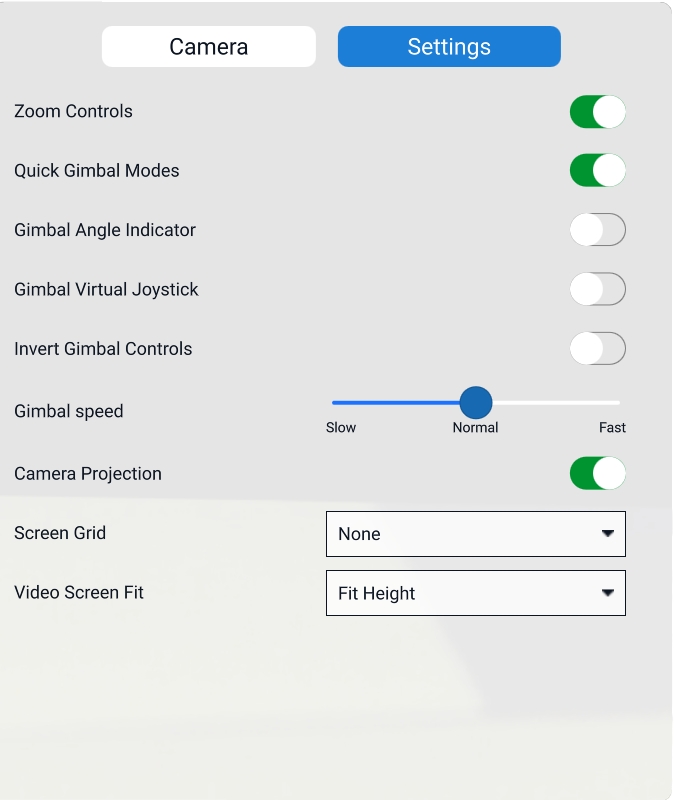
The settings tab on the upper right corner of the menu gives access to general settings:
The grid option is either a square or a screen division by 3x3:
Target following is the mode where the vehicle actively follows a tracked target. To engage target following mode you will first need to track a target. Once a target is locked you can engage target following by giving the Target Following command. The command is located on the left side of the Fly view where the pilot commands are located.
The system will start following a target when these conditions are met:
A target is actively being tracked
The target is less than 2,000 meters away from the vehicle
Target following has been enabled
TIP: The camera can rotate 360 degrees. To avoid reaching the maximum rotation angle it is recommended to fly towards, follow, or directly above a tracked object.
When first entering target following mode the vehicle will switch its flight mode to "HOLD" mode. The target following system will then issue reposition commands every 1.5 seconds for as long as the target following conditions are met. If the conditions are no longer met the vehicle will remain circling the position of the last known target location. If the tracked target is lost you can re-engage target tracking by simply tapping on the object in the video feed, the system will follow any target selected target following is enabled and the conditions are met.
If the vehicle is flying above the tracked target, or if the vehicle is flying faster than the tracked target, it will circle above the target keeping the target in view at all times.
If target following is disengaged the vehicle will start circling its current position.
RGB AND THERMAL - Single payload
The Raptor is a lightweight long-range dual EO-IR stabilized camera turret. It features a significant IR range increase and a X80 EO zoom.
Make sure that the second screen device is connected to the same Wi-Fi network or hotspot as the DeltaQuad Controller and open the .
ZOOM
X40 (X20+X2 digital)
X40 (X20 + X2 digital)
X40 (X20 + X2 digital)
FOV
60° WFOV – 3° WFOV – 1.5° DFOV
60° WFOV – 3° NFOV – 1.5° DFOV
60° WFOV – 3° NFOV – 1.5° DFOV
THERMAL RESOLUTION
640×480
640×480
1280×720
EO-IR
Single
Dual
Dual
PITCH FOR
-45° to +135°
-45° to +135°
-45° to +135°
YAW/ROLL FOR
-180° to +180°
-180° to +180°
-180° to +180° Optional 360° Continuous
WEIGHT
460 grams
530 grams
560 grams
DIMENSIONS
D-64mm x H-94 mm
D-64mm x H-94mm
D-64mm x H-94mm
Track
By pressing the "Track" button and subsequently choosing an object within the video display, you can instruct the gimbal to track that specific object. This functionality is most effective when there is a clear contrast between the object and its background.
POI
You can establish a Point of Interest (POI) on the map view by simply tapping the POI button and then tapping on your desired location on the map. Alternatively, you can set a POI while in camera view by selecting the POI option and tapping on the specific point of interest within the video frame. The gimbal will then make an effort to maintain focus on the selected POI's location on the ground.
GRR
In this mode, the camera will hold its position relative to the ground. This is the recommended mode for camera control. The joystick controls the camera.
OBS
In this mode, the camera will hold its position relative to the vehicle's movement. The joystick controls the camera.
LPOS
LPOS (Local Position) is the mode in which the camera tracks the orientation of the aircraft, so when it makes a turn, the camera maintains the same angle relative to the aircraft.
EO
(Electro-optical) Activates the RGB (normal color video) mode of the camera.
IR
(Infra-red) Activates the Infrared camera for night vision and seeing between foliage.
Zoom Controls
Enables zoom controls in the camera control window.
Quick Gimbal Modes
Makes the gimbal modes (GRR, OBS, and LPOS) available in the camera control window.
Gimbal Angle Indicator
The camera angle (in degrees) will be displayed in the Fly view.
Gimbal Virtual Joystick
Enables a virtual joystick left of the camera control interface in the Fly view.
Invert Gimbal Controls
Iverts the gimbal controls.
Gimbal speed
With the slider, the gimbal speed can be set. It is set to Normal by default.
Camera Projection
When the map is selected in the Fly view the camera's Field of View is indicated by a blue cone.
Screen Grid
This option will display a grid overlay on top of the video image.
ZOOM
X80 (X40 + X2 digital)
FOV
60° WFOV – 1.5° NFOV – 0.75° DFOV
THERMAL RESOLUTION
1280×720
PITCH FOR
-45° to +80°
YAW/ROLL FOR
-180° to +180° Optional 360° Continuous
WEIGHT
850 grams
DIMENSIONS
D-90mm x H-120mm