Setup
This chapter covers the basic hardware and software setup of the DeltaQuad Evo GOV.
Chapter index
DeltaQuad Evo Flight Case
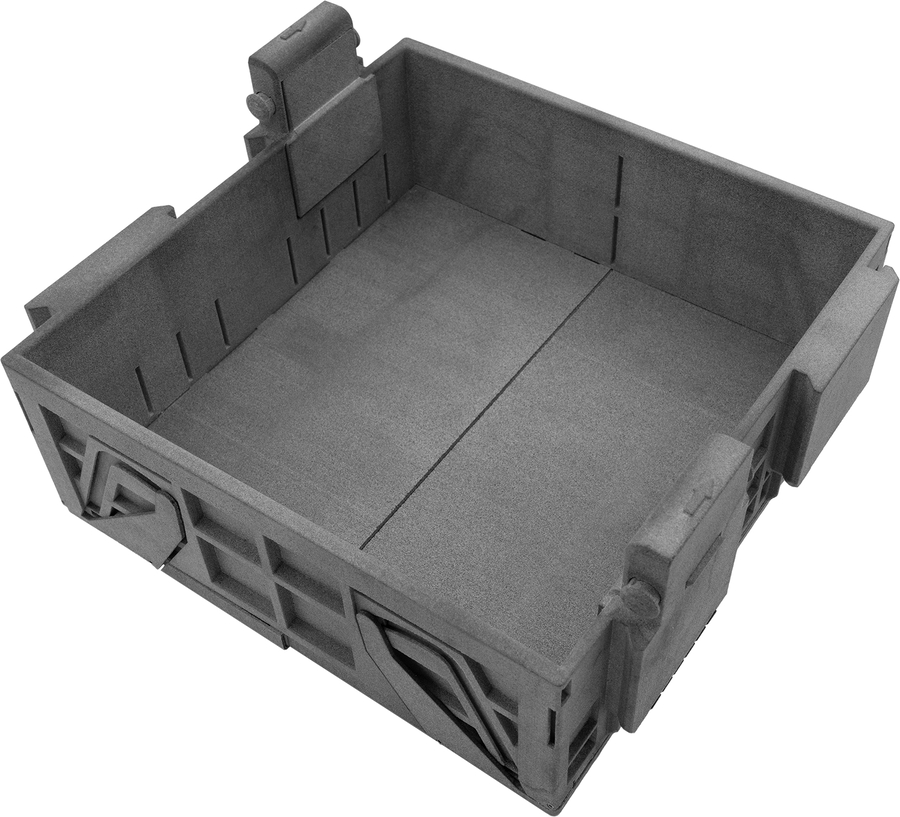
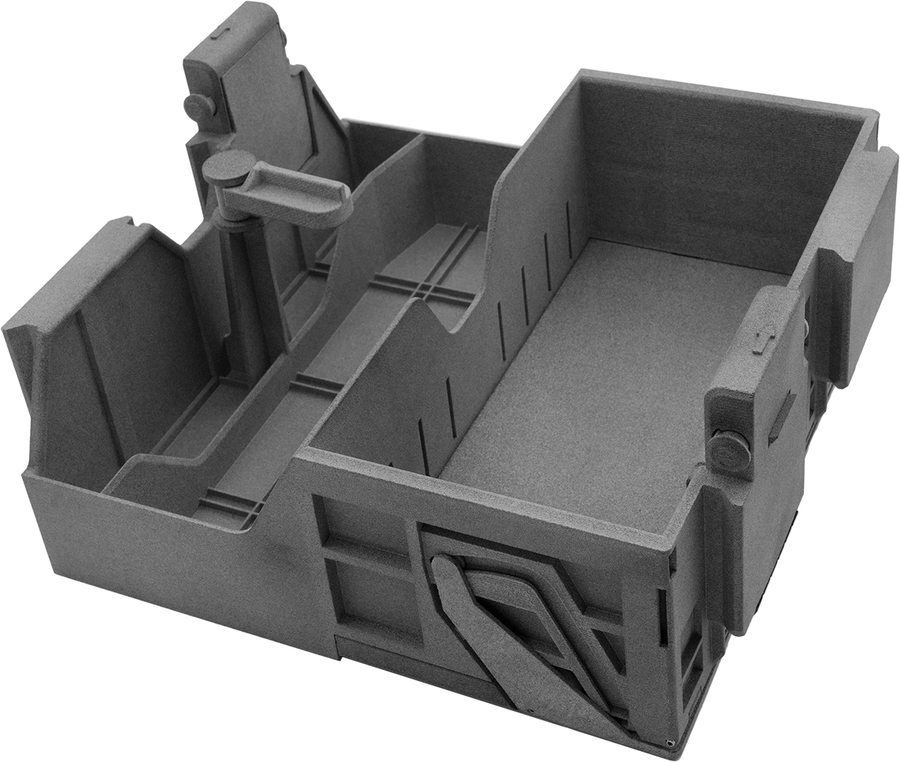
This section will discuss how the DeltaQuad Evo Government and its accessories are stored in the flight case. It gives an overview of the package contents.
The DeltaQuad Evo and its accessories are stored in a rugged flight case.

The DeltaQuad Evo must always be stored in the flight case with the landing gear legs deployed.
Five compartments will be accessible by removing the DeltaQuad Evo's fuselage from the flight case.

Upper compartment
Dual battery charger
Right compartment
Upper layer: Silvus radio and GCS controller, two omnidirectional Silvus antennas
Lower layer: Chargers for Toughbook and Silvus radio, Silvus charging dock, Silvus breakout cable
Lower compartment
4 DeltaQuad Evo lithium-ion batteries
Left compartment
Payloads: Can hold up to 4 single payloads or 2 dual payloads.
Bottom compartment
Toughbook - Ground Control Station (GCS)
Package contents
















Assembly
In this section, we cover the steps for assembling and disassembling the DeltaQuad Evo.
Unpacking and initial hardware setup
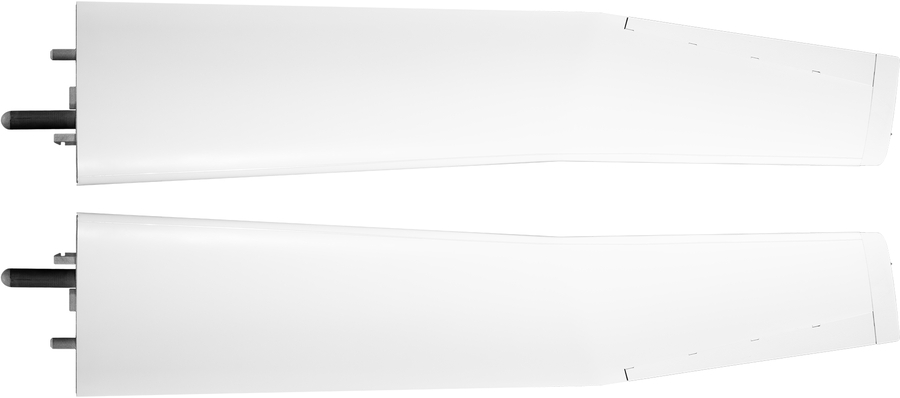
Mounting the wings
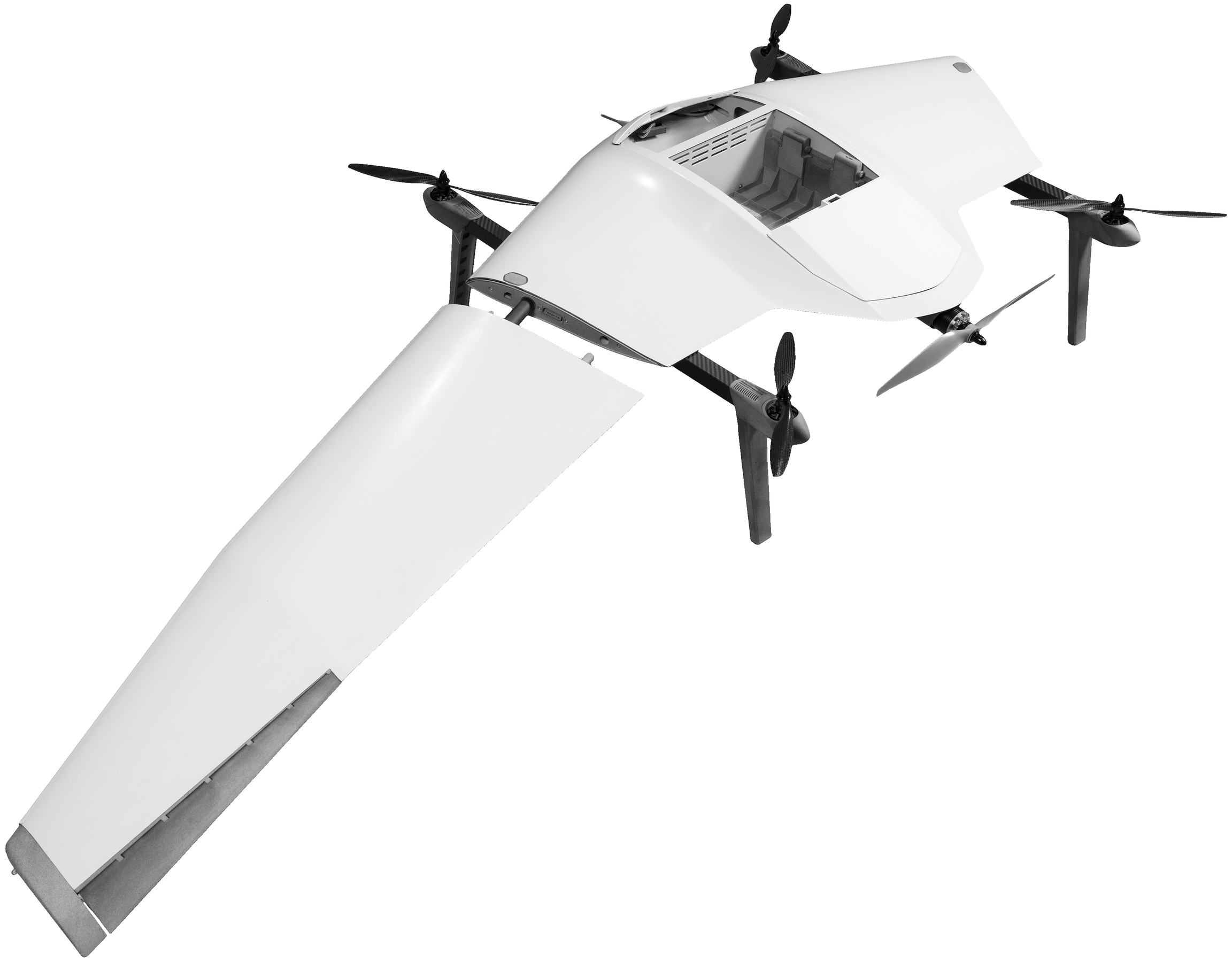
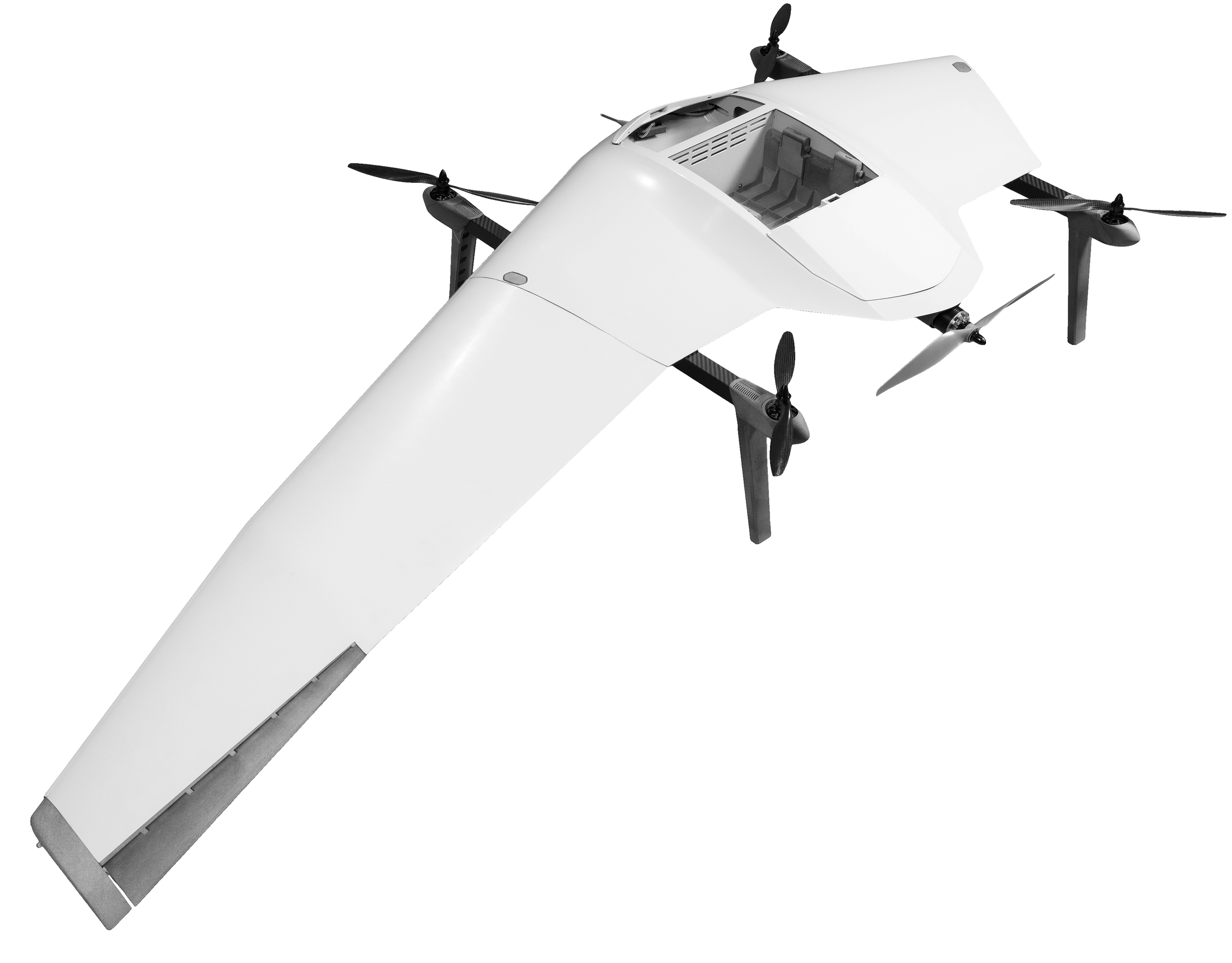
Take the DeltaQuad Evo out of the flight case and place it on a flat surface with the landing gear deployed.

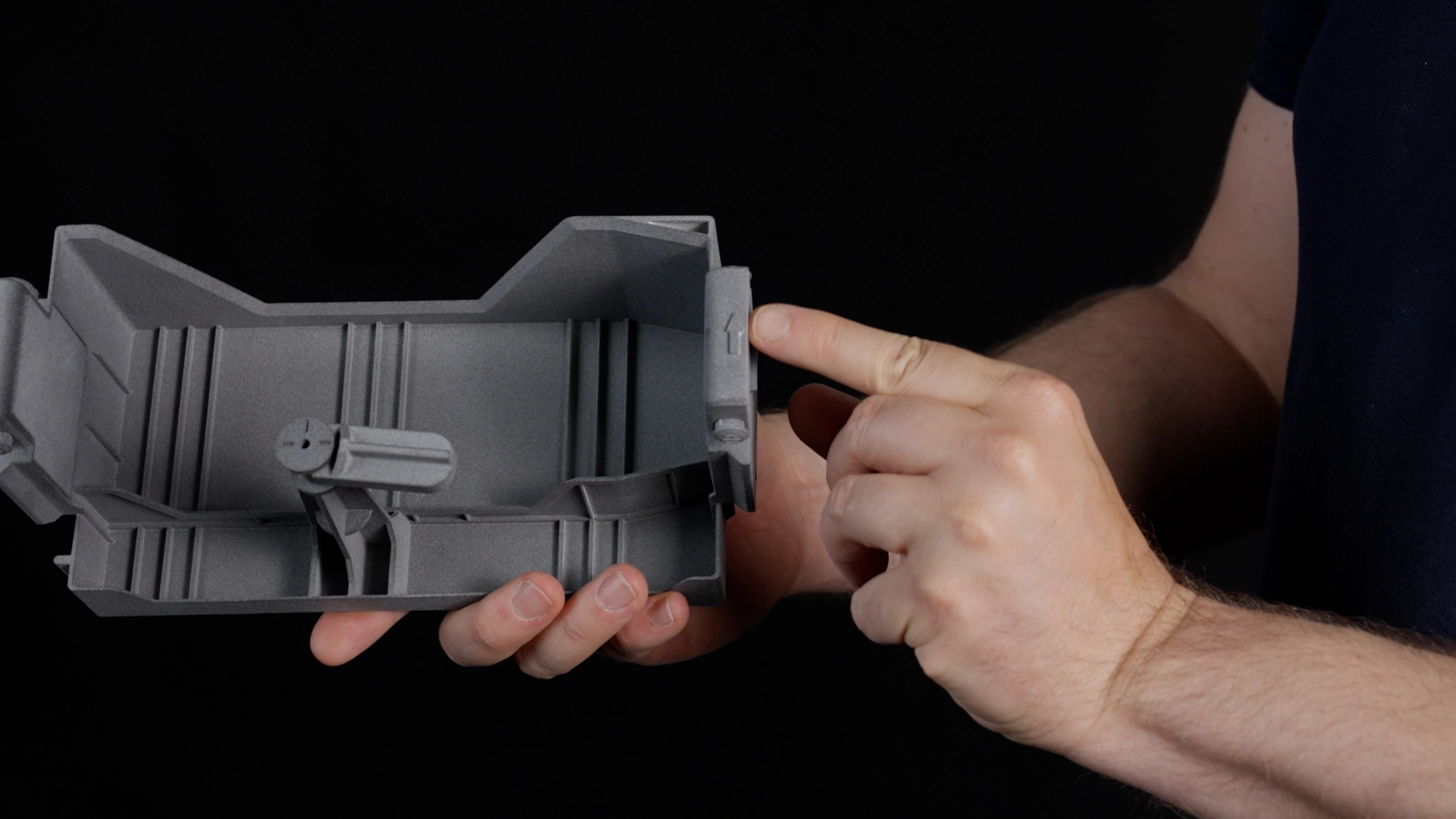
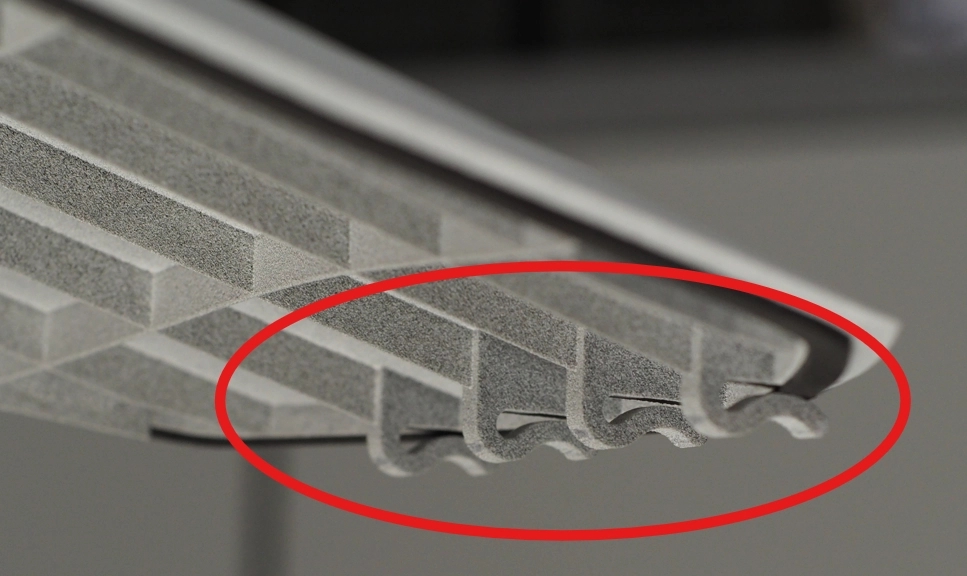
The wing has a large spar near the leading edge and a smaller spar near the trailing edge. In front of the large spar is a keying mechanism in the form of a cuboid.

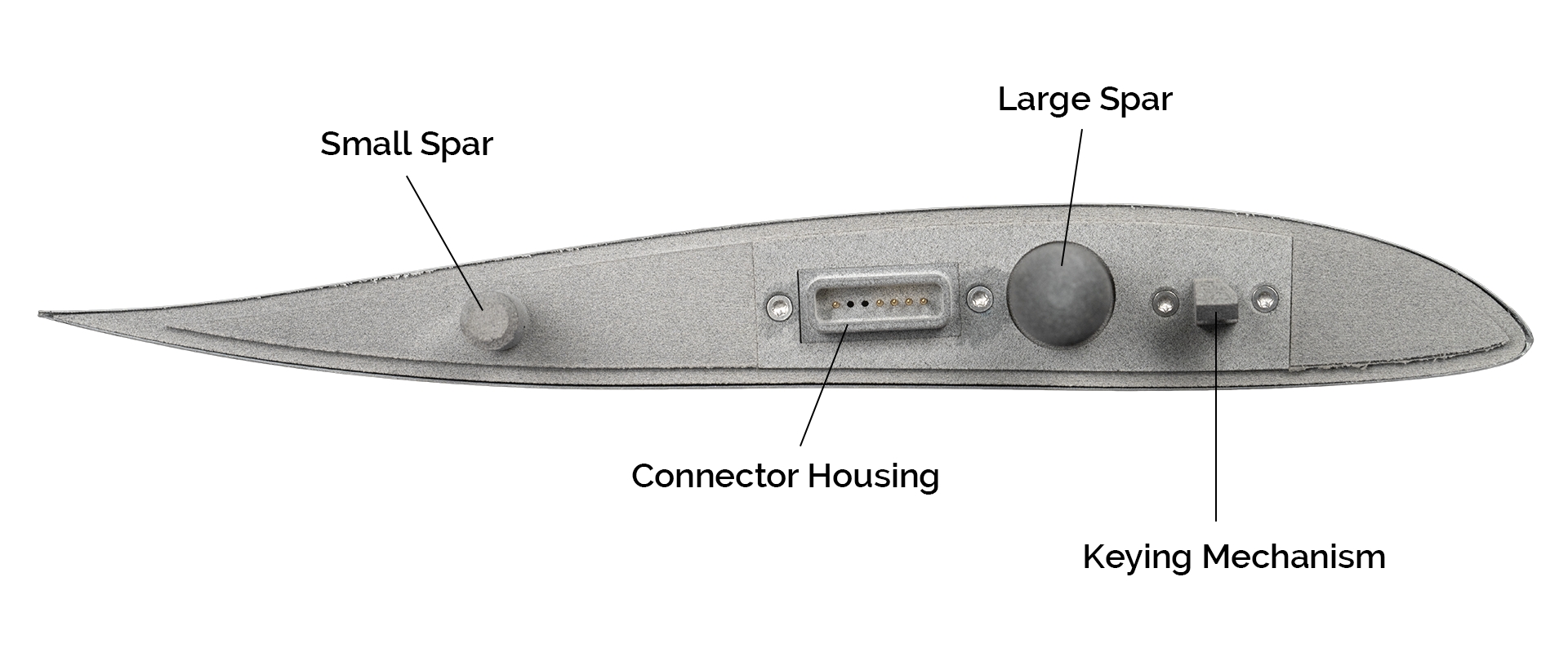
This keying mechanism prevents mounting the wings on the wrong side.

Slide the carbon spars of the wings into the corresponding blind holes in the fuselage.
When fully locked, a clicking sound from the wing lock mechanism should be audible, and the wing lock must sit flush with the fuselage.
Disassembly and storage
To disassemble the DeltaQuad Evo, follow the assembly steps in reverse order.
Press down on the wing lock mechanism with your thumb while using the same hand to hold the fuselage in place. With your other hand, pull the wing away from the fuselage.

DeltaQuad Evo Battery
In this chapter, we will cover the DeltaQuad Evo Li-ion battery, including how to handle it, install it in the DeltaQuad Evo, and power up the vehicle.
Battery Handling
This chapter will cover how to properly handle the DeltaQuad Evo Li-ion battery.

Safety Notice
Use only the DeltaQuad Dual Battery Charger to charge the DeltaQuad Evo Li-ion battery. Do not use a NiCd or NiMH charger. Failure to follow this guidance may result in a fire, which could cause personal injury or property damage. DeltaQuad assumes no responsibility or liability for damages resulting from the use of third-party chargers.

Charge the batteries only at ambient temperatures between 5°C and 30°C (41°F and 86°F).
Never charge batteries unattended unless you are using a Battery Safe. When charging Li-ion batteries, always remain in constant observation to monitor the process and respond to any potential issues.
Ensure the battery is charged under supervision and away from flammable materials or surfaces.
Disconnect the battery from the charger once it is fully charged.
Do not use a damaged charger.
If you notice a battery starting to balloon or swell, discontinue the charging process immediately. Disconnect the battery and dispose of it safely. Continuing to charge a swollen battery can result in a fire. Similarly, never use a battery that is swollen or ballooned.
Since delayed chemical reactions can occur, it is best to observe the battery as a safety precaution. Battery observation should take place in a safe area outside of any building or vehicle and away from combustible materials.
Wire lead shorts can cause a fire! If you accidentally short the wires, place the battery in a safe area for observation for approximately 1 hour. Additionally, if a short occurs and makes contact with metal (such as rings on your hand), severe injuries may result due to electrical conductivity.
A battery can still ignite even after 1 hour. A battery that emits a hissing sound is almost certain to ignite. Prioritize your safety and that of your surroundings before taking any action.
In the event of a crash, wait 10 minutes to ensure the battery was not compromised before removing and safely disposing of it.
Do not use a battery that has been involved in a crash or sustained any significant impact.
Do not expose the batteries to water. If a battery pack is exposed to water, replace it immediately.
Charging the Battery
This chapter will discuss how to properly charge and store the DeltaQuad Evo Li-ion battery.
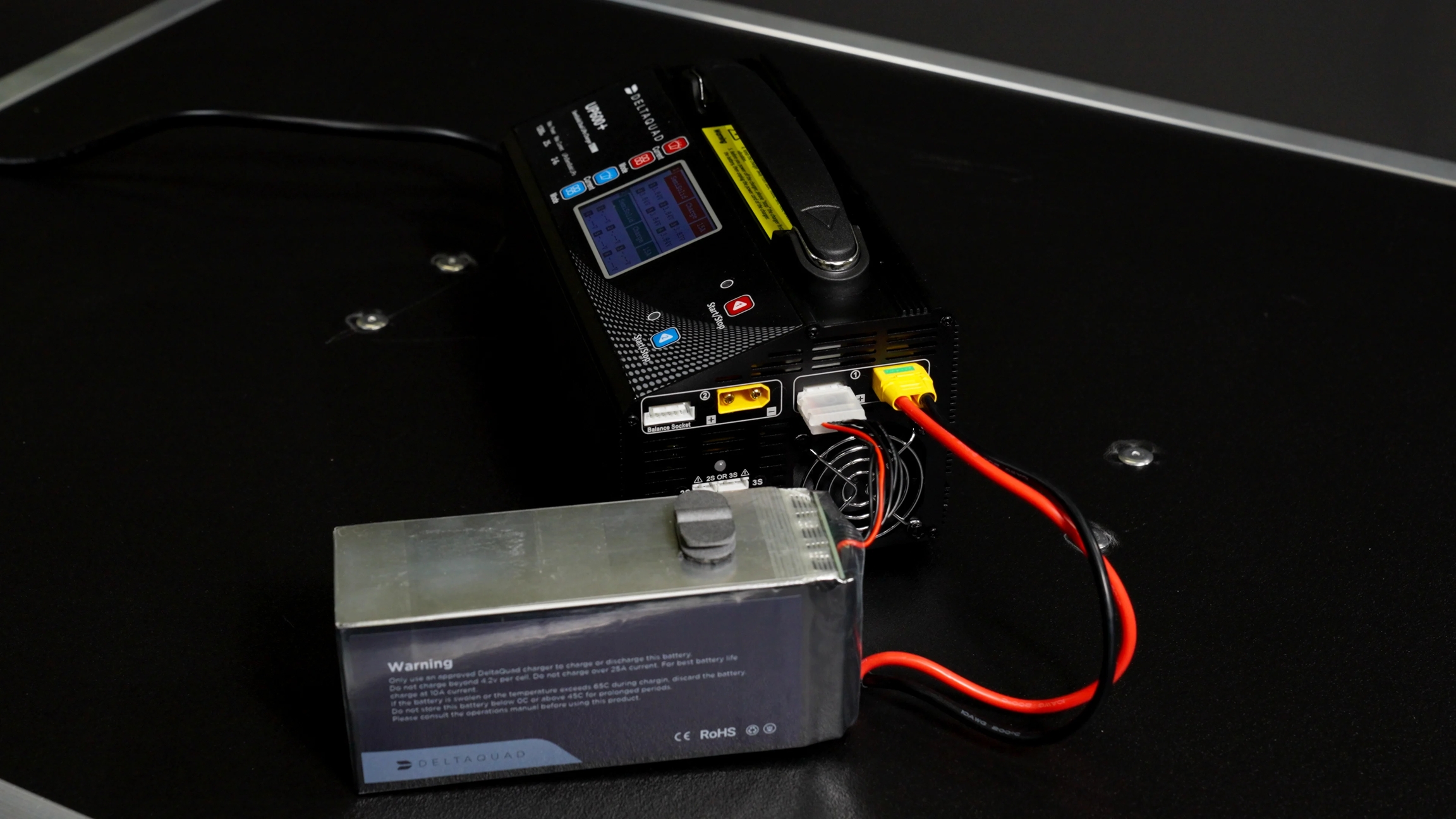
Power on the DeltaQuad Evo Dual Charger.
Plug the yellow XT90 connector from the battery's power cables into the charger.

Take the balance lead, which is the smaller group of cables with the white connector, and plug it into the corresponding balance port on the charger.

With the DeltaQuad Evo Dual Charger, you can charge two batteries simultaneously. Therefore, make sure to connect the cables of each battery to the appropriate channel.
Each channel has two buttons: one for Current and one for Mode.

Set the mode to Charge by pressing the mode button.
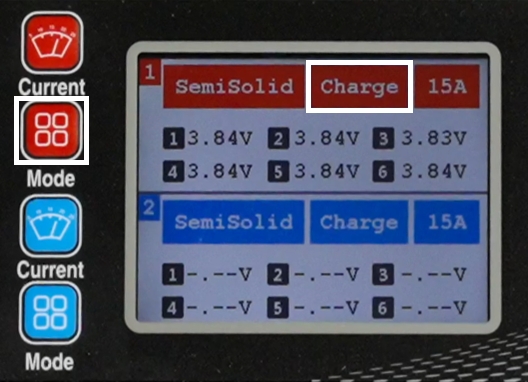
We recommend charging the DeltaQuad Evo batteries at a rate of 10 to 15 amperes. You can adjust the charging current by cycling through the available values using the current button.
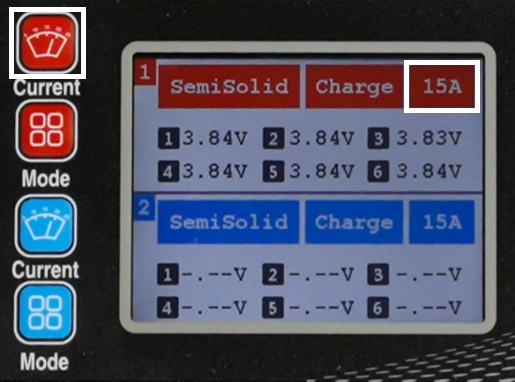
Press Start.

Your DeltaQuad Evo battery is now charging.

Storage Charge the Battery
Plug the power and balance cables of the battery into one of the channels on the charger.
Set the mode to Storage by pressing the Mode button.
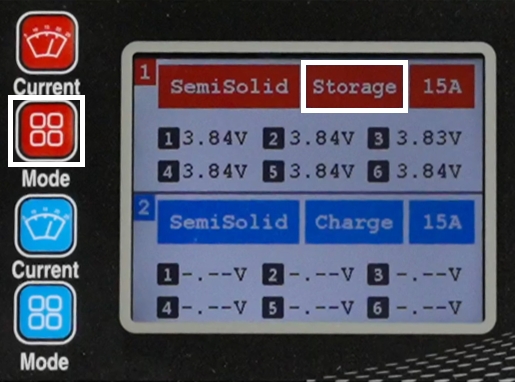
Press Start.
Storing the Battery
This section describes how to properly store the DeltaQuad Evo Li-ion baterry.
The battery should be stored in a safe, dark location at temperatures between 5 and 30 degrees Celsius.
If the battery is fully discharged or fully charged, perform a storage charge (approximately 50% charge or 3.7V per cell) before long-term storage. Use the Storage mode on the charger for this purpose. Storing batteries at 50% charge helps reduce stress on the cells, which can significantly extend the battery’s overall lifespan.
During long-term storage (3+ months), it is recommended to cycle charge the batteries at least once. Fully charge the battery to 100%, then discharge it to a storage charge level of 50%.
Keep the battery out of reach of children and animals. Avoid placing it near heat sources, such as furnaces or heaters.
Always keep the battery dry and do not expose it to water or any other fluids.
Remove the battery from the UAV when it is not in use.
Main Battery Placement
This section will cover the proper placement of the main battery.
Always fly with a fully charged battery (at least 95%).
Placing the Main Battery
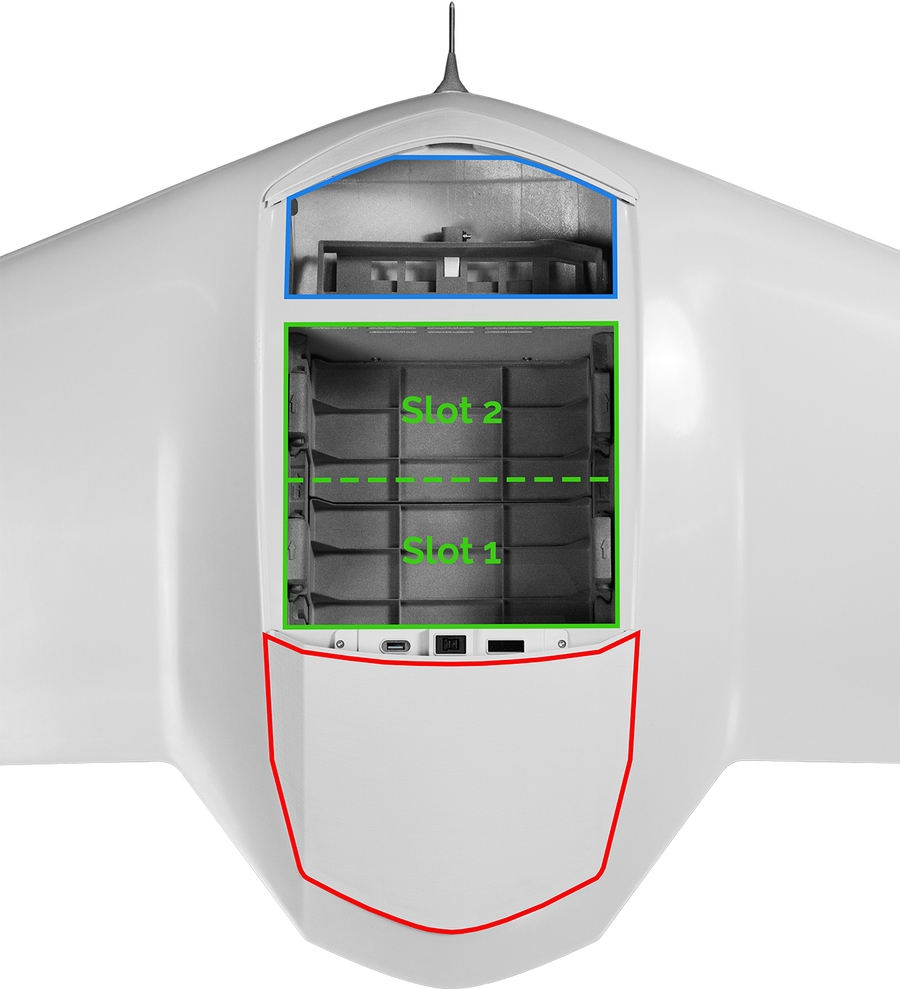
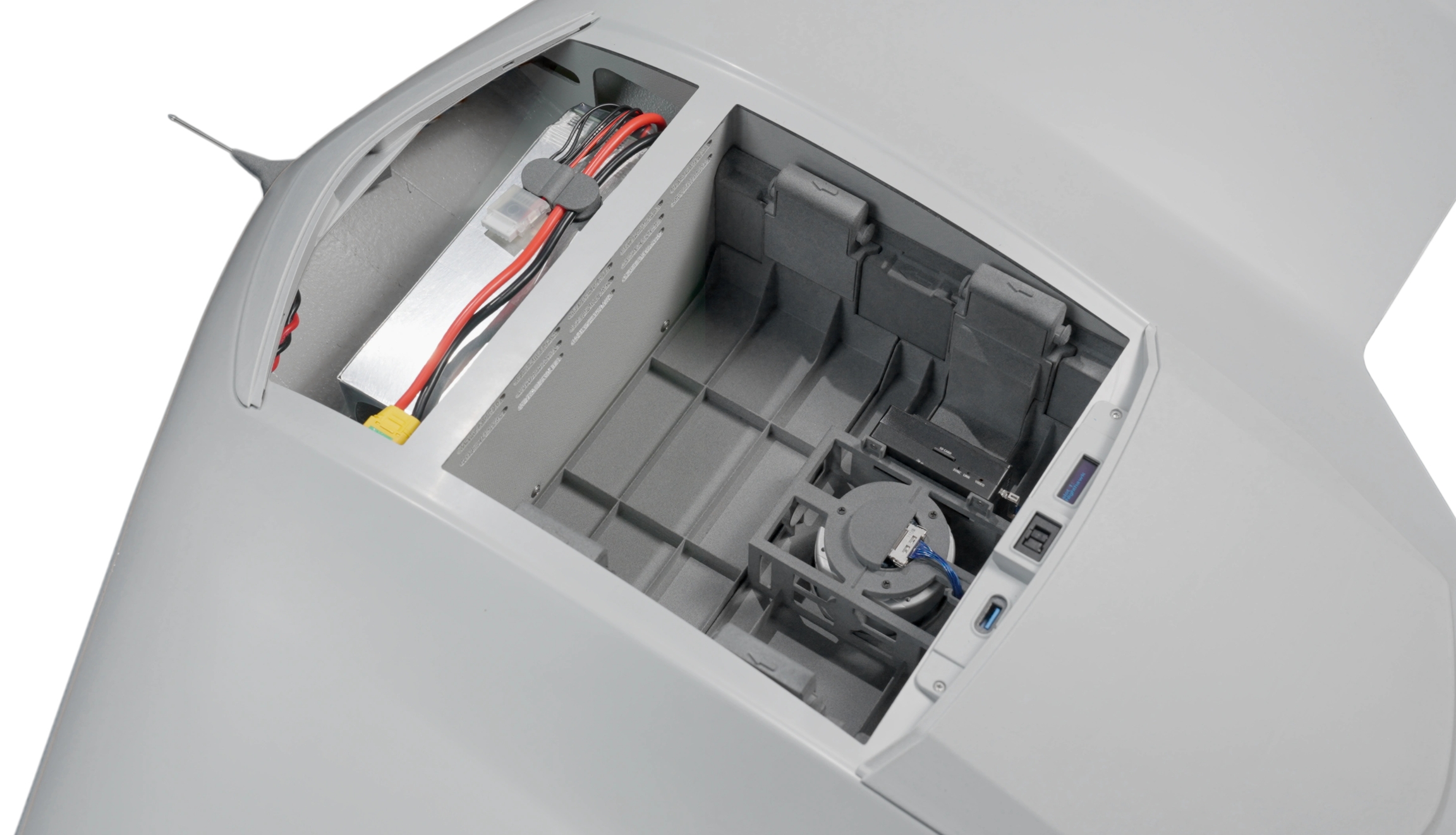
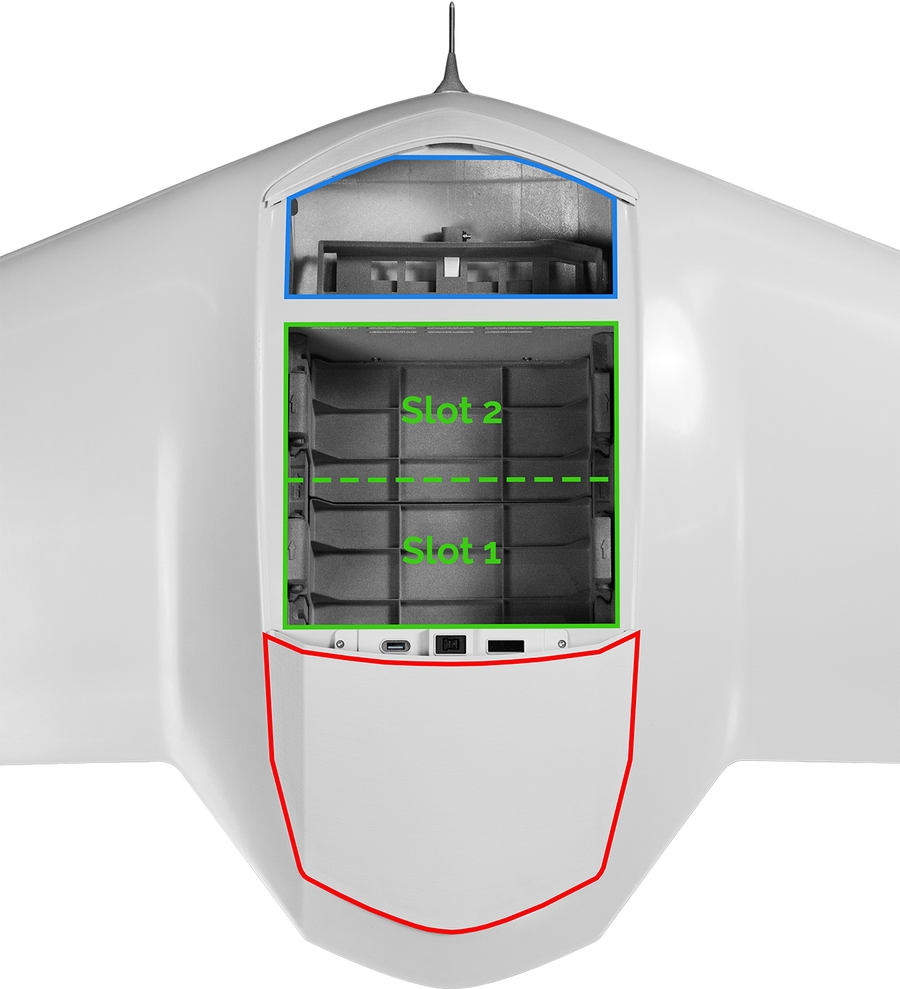
The DeltaQuad Evo has a battery bay (blue), a payload bay (green), and an avionics bay (red).
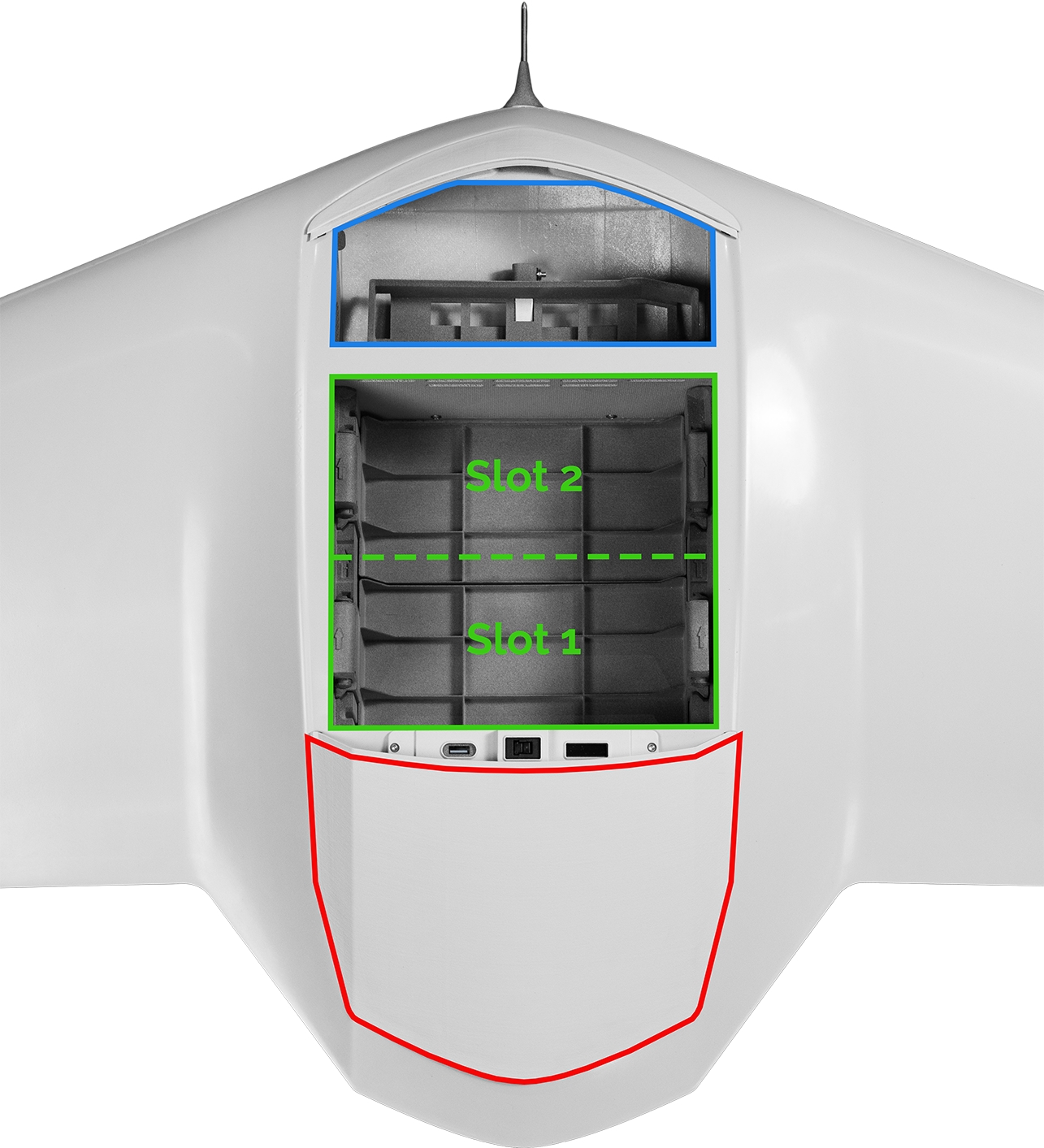
The main battery needs to be placed on the tray in the battery bay which is located at the front of the fuselage.

The tray has the same form and shape as the underside of the battery.
The battery must be placed in such a way that it fits on the tray.
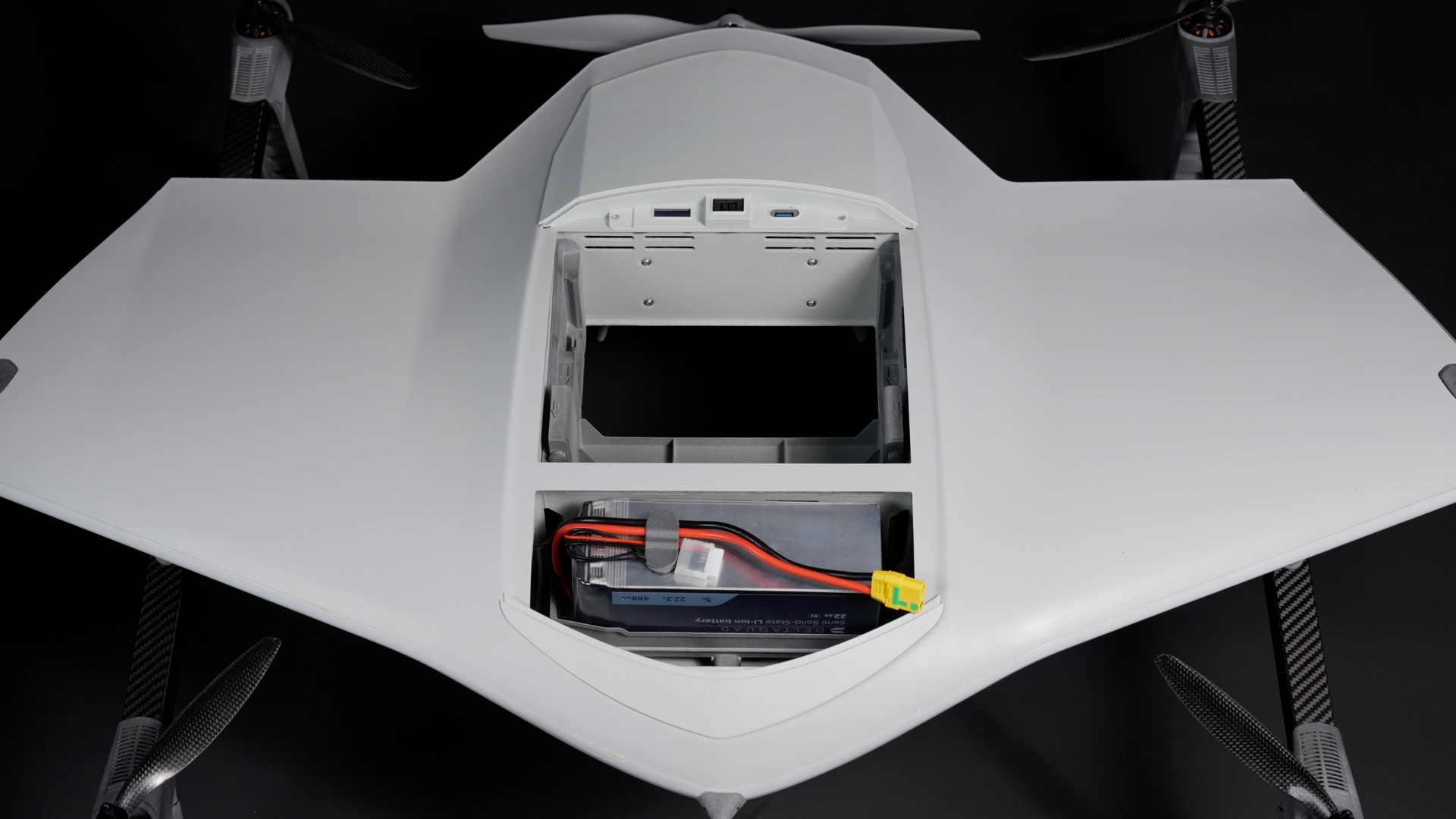
The thicker power cables must exit the bottom of the battery and lead over the top of the battery toward the XT90 socket of the DeltaQuad Evo.

Always make sure that no battery cable is located between the battery and the back wall of the battery bay.

Auxiliary Battery Placement
This section will cover the correct placement of the auxiliary battery.
Always fly with batteries that are at least 95% charged, and ensure that both batteries have the same charge level.
Flying with two batteries of differing charge levels connected to the same circuit is dangerous, as the batteries will attempt to equalize their charges rapidly. This can cause excessive current flow, leading to overheating and potential failure. The resulting heat may cause the batteries to overheat and possibly catch fire, creating serious safety hazards
Never attempt to fly using only the auxiliary battery, as this will result in an incorrect center of gravity (CG). The main battery must always be installed.
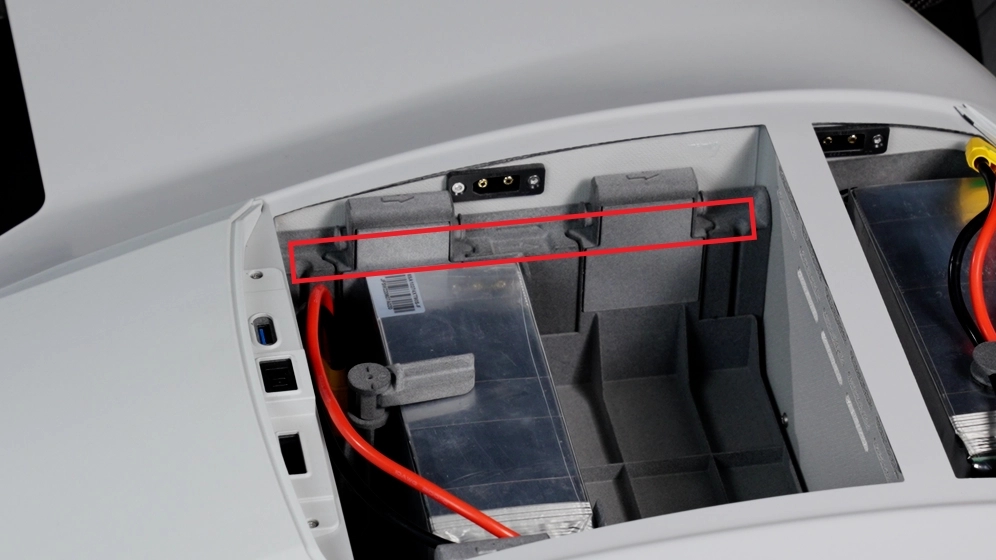
Placing the Auxiliary Battery
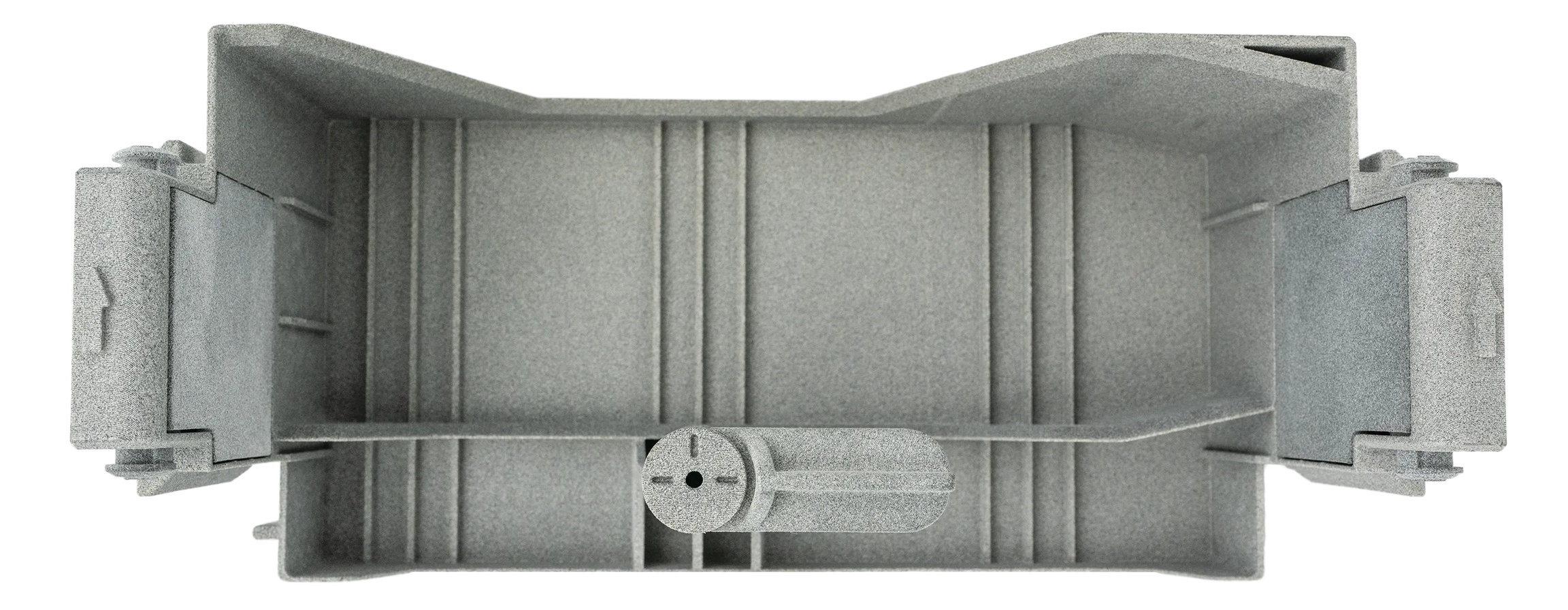
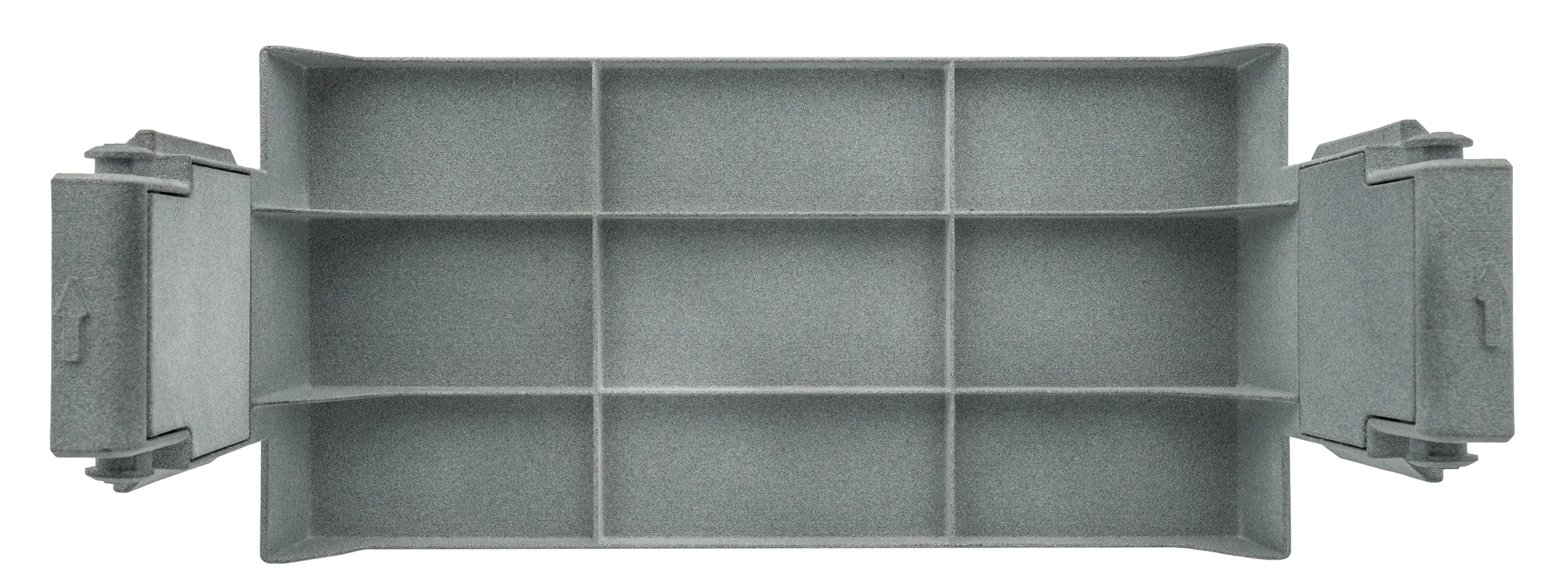
Every DeltaQuad Evo includes an auxiliary battery payload box.
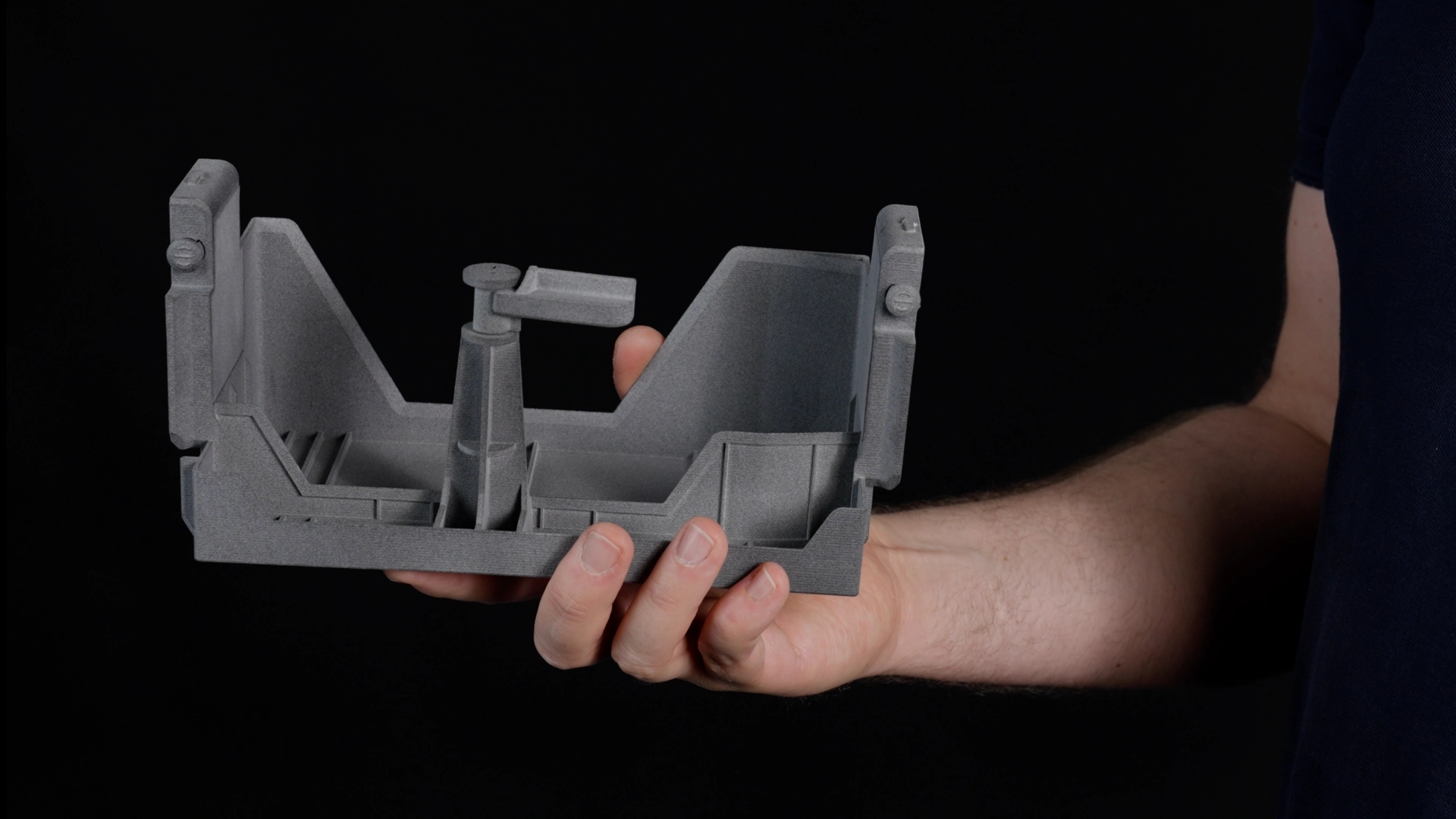
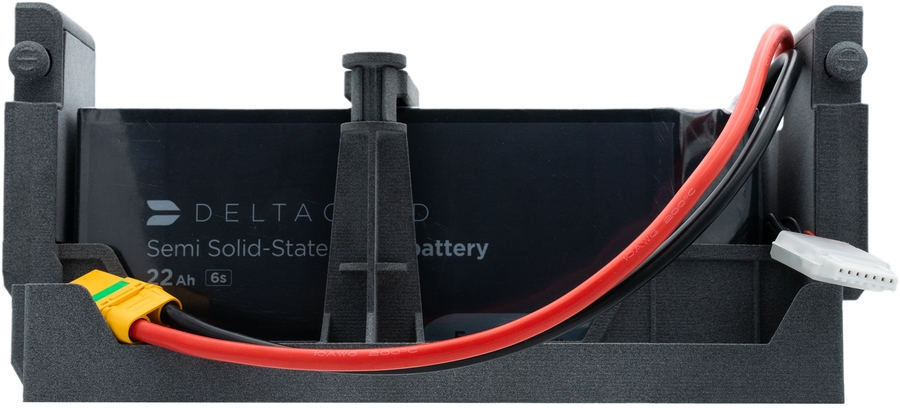
Similar to the main battery tray, the auxiliary battery holder is shaped to match the bottom plate of the battery.

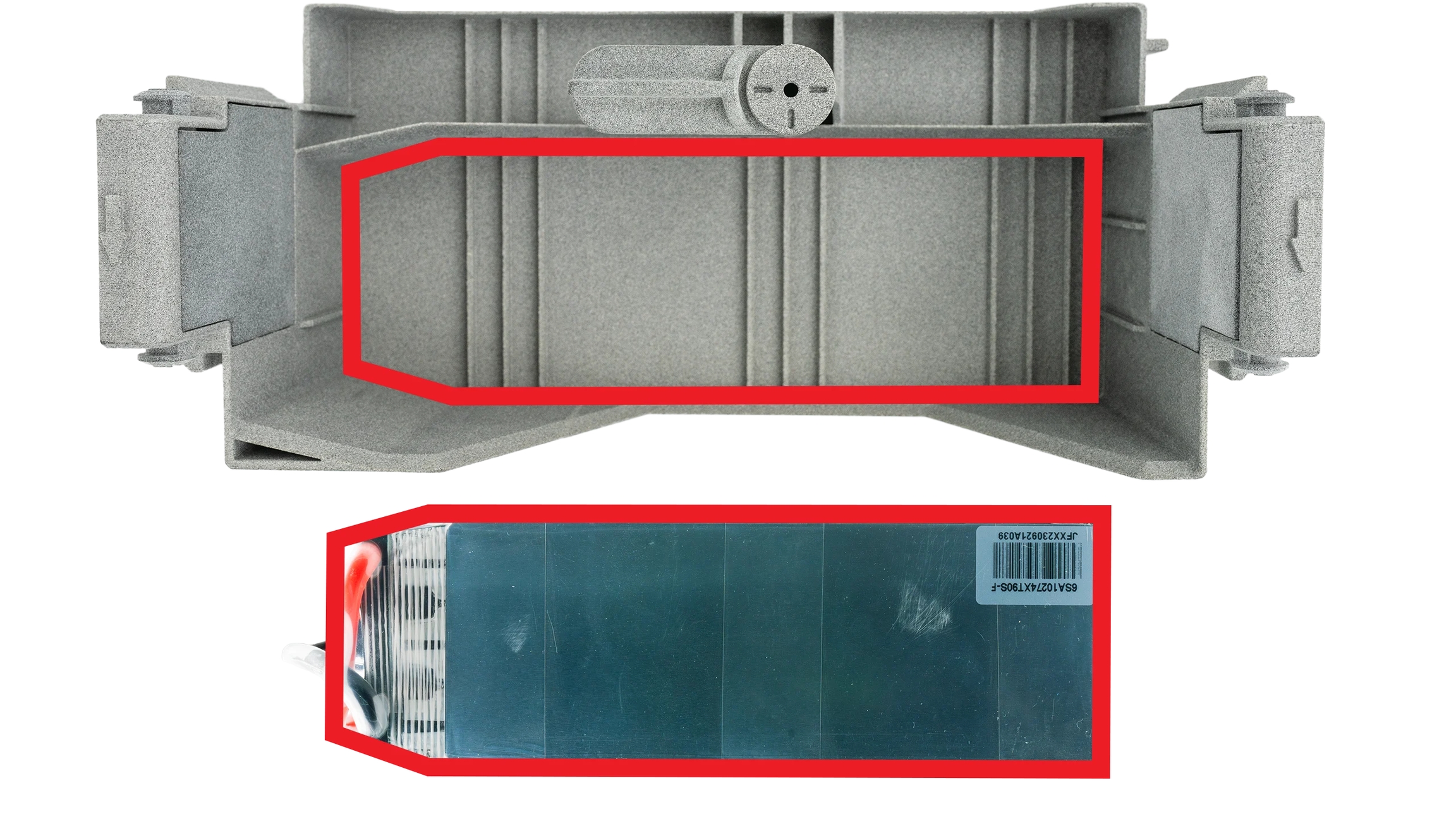
The auxiliary battery must be positioned to fit properly on the tray. The thicker power cables should exit from the top of the battery and run over it towards the XT90 socket of the DeltaQuad Evo.

The auxiliary battery holder features a latch mechanism that secures the battery in place. After positioning the battery, rotate the latch 90 degrees until it is aligned above the battery.

Installing the Auxiliary Battery Payload Box
The auxiliary battery payload box must always be installed in Payload Slot 1, located at the rear end of the fuselage, as it is the heaviest payload.
DeltaQuad Evo Payload Slot Layout
Slot 1: Located at the rear end of the fuselage, closest to the pusher propeller.
Slot 2: Located at the front end of the fuselage, closest to the nose of the vehicle.

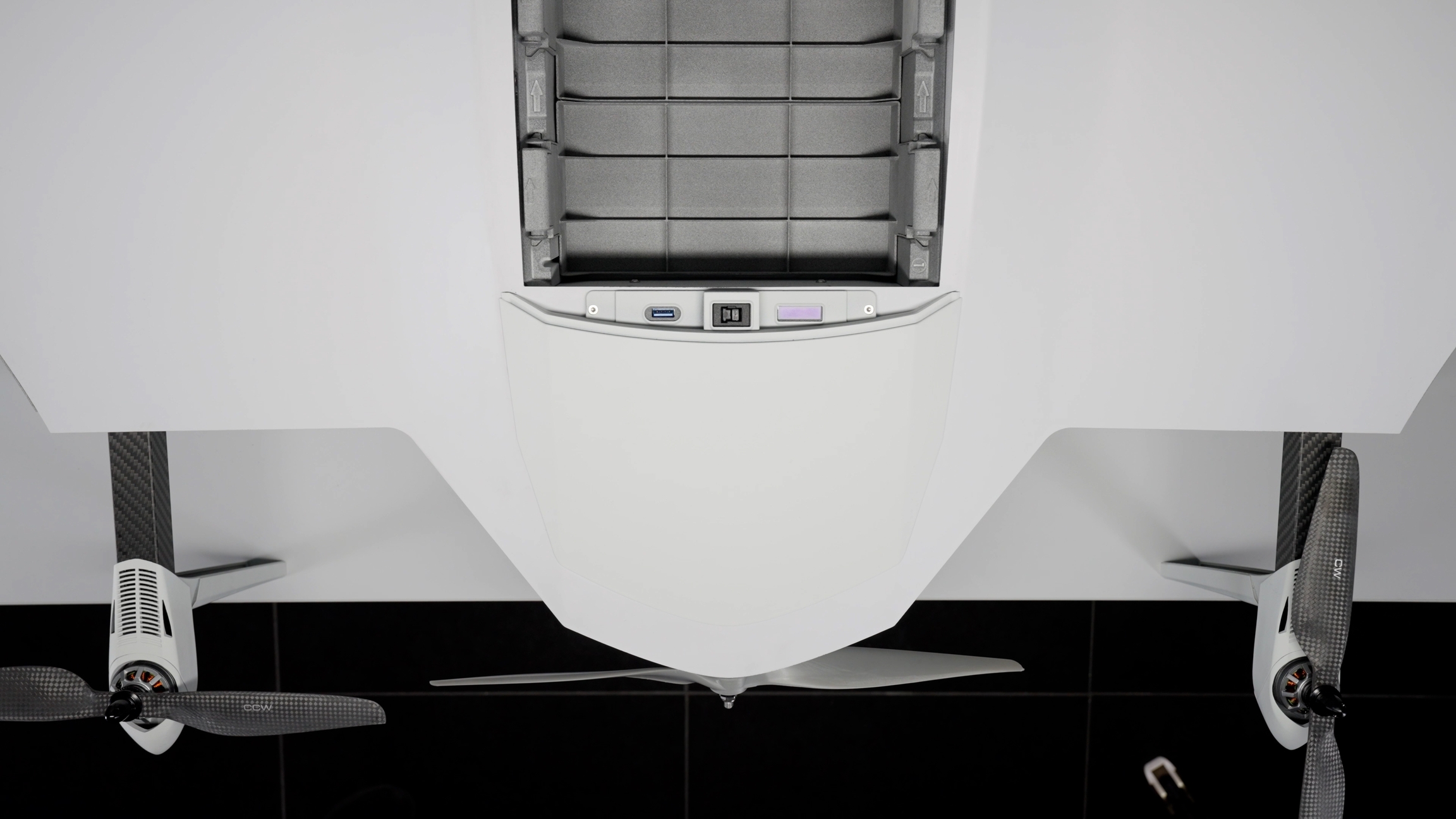
Each payload box features two arrows displayed on top of each handle.
There are corresponding arrows on the left and right sides of the DeltaQuad Evo's payload bay.

The arrows on the payload boxes must be aligned with the arrows in the payload bay.
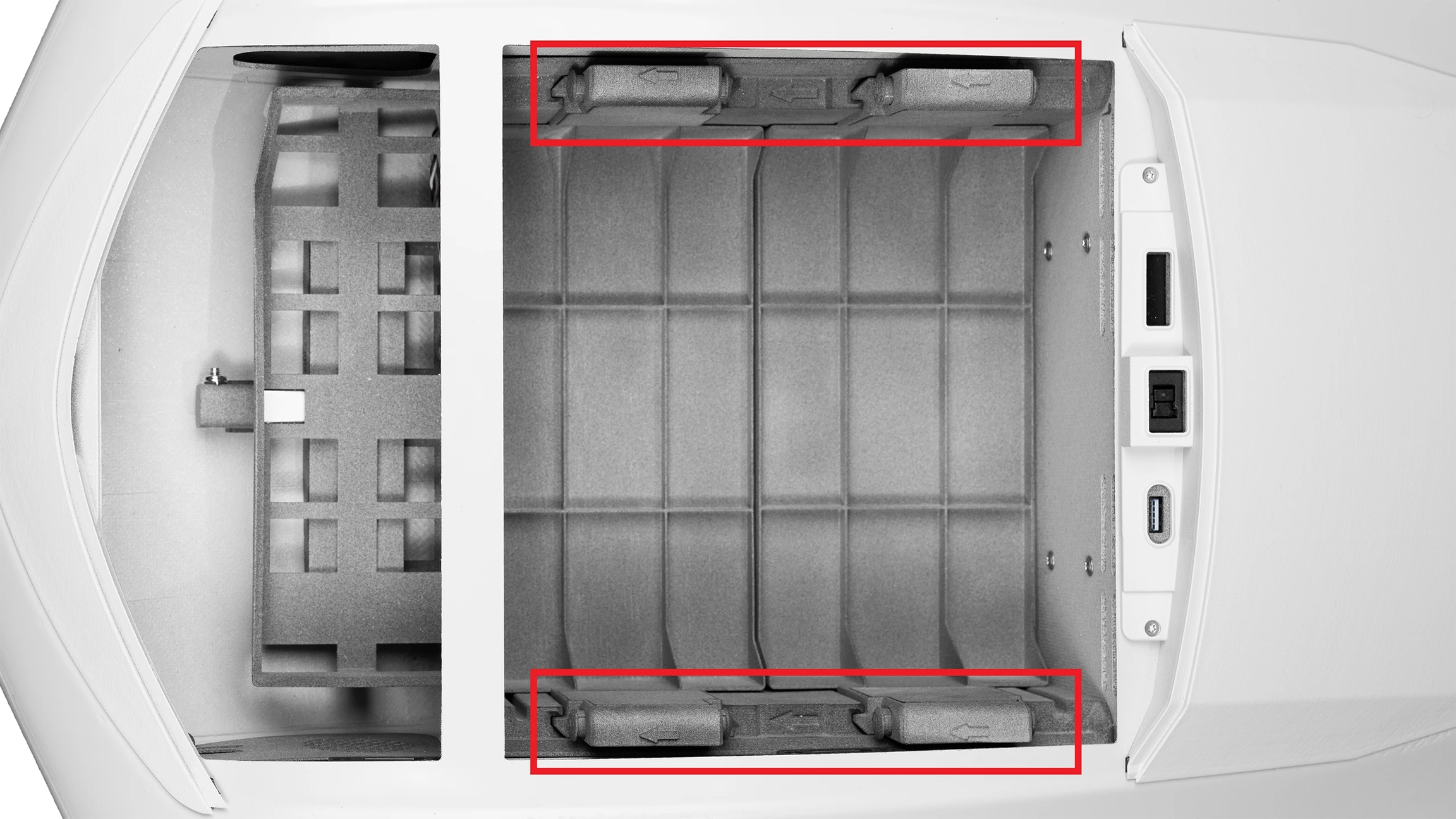
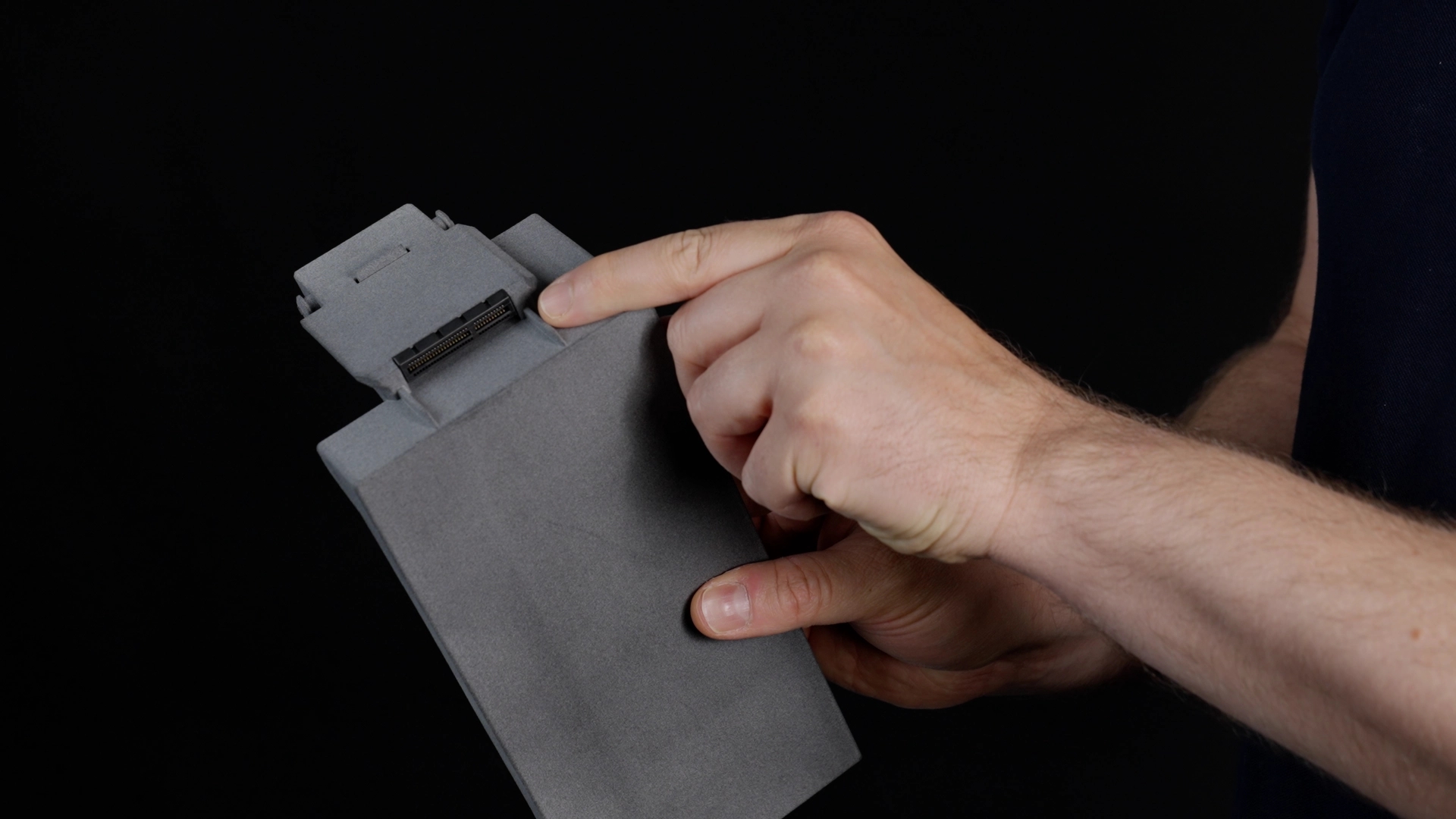
Proper orientation of the payload box is crucial, as its I/O board must align with the corresponding I/O board in the payload slot.

Slide the payload box into the slot.

Push both handles of the payload box down until you hear a click from the locking mechanism, ensuring that the box is securely seated in its slot.
The frame of a properly installed payload box should be flush with the frame of the payload bay.
Removing a Payload Box
Each payload box has handles with two locking pins positioned opposite each other. To remove the payload box, grasp the handles with both hands, press the locking pins inward, and pull the payload box out.

Empty Payload Box
This section will discuss the empty payload box and its functionality.
Every DeltaQuad Evo comes with an empty payload box.
Before takeoff, the payload bay must be fully loaded with either two single payload boxes or one double payload box. Otherwise, the OLED screen above the avionics bay will display one of the following messages:



If payload slot 1 is occupied by, for example, the Raptor 360, then payload slot 2 must be filled with the empty payload box that comes with every DeltaQuad Evo.
Powering the Vehicle
In this section, we will explain how to power on the DeltaQuad Evo.
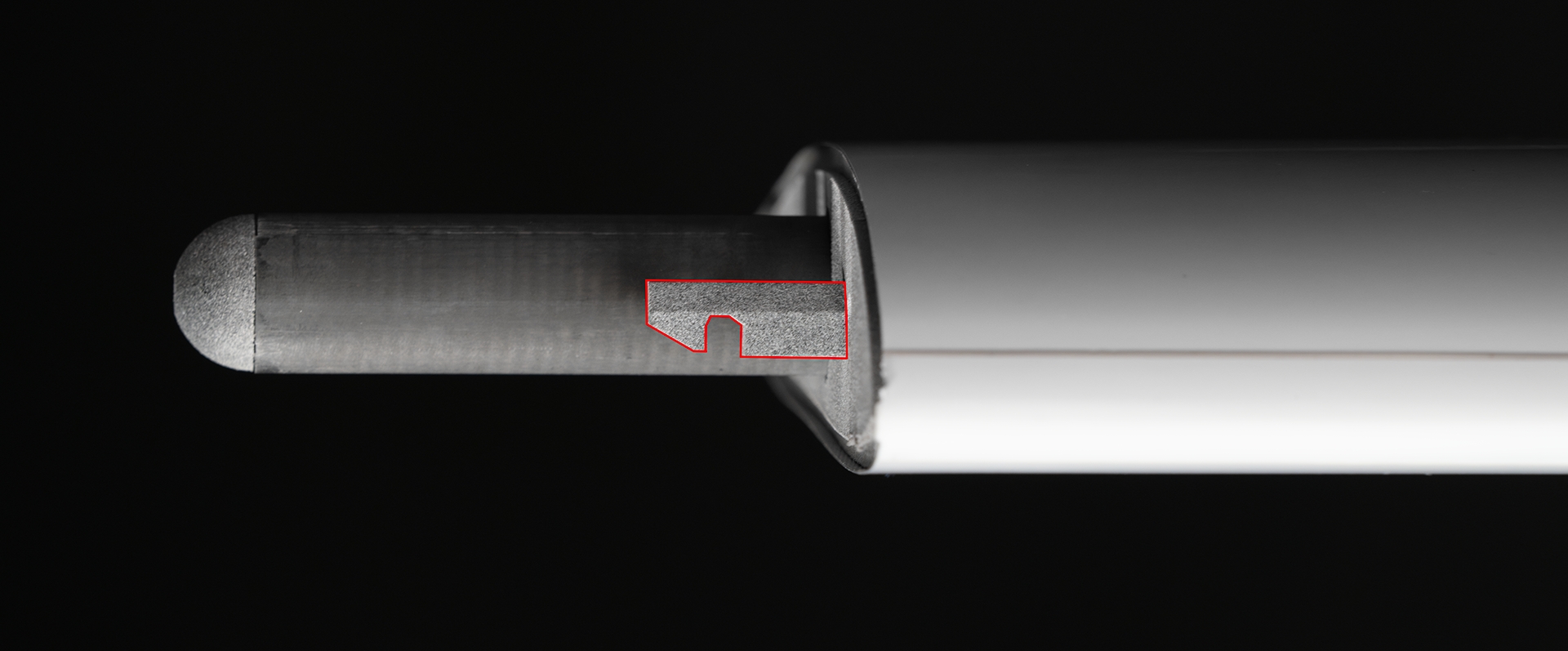
After placing the main battery as described in the chapter Main Battery Placement, connect the XT90 connector of the battery to the XT90 socket in the battery bay.
The XT90 socket is located on the right side of the battery bay (standing in front of the vehicle).
The XT90 connector and socket have key features that facilitate easy identification and proper alignment during connection. The interlocking shapes at the ends of the connector and socket must align to ensure correct placement. This design ensures that the connectors can only be plugged in one way.


Insert the XT90 connector of the battery into the XT90 socket of the Evo until it is fully seated.

Be sure to push the connector in fully to ensure a secure connection. If the connectors are not fully joined, the vehicle may still power on, but the connectors could overheat. During flight, vibrations might cause the battery plugs to come loose, which could result in the vehicle losing power.
Anti-spark Plug

Vehicle Initialization
When powering up the DeltaQuad Evo, it will go through an initialization routine that can be monitored on the OLED display located above the avionics bay.




After the successful initialization, the OLED will read Ready to fly.

Below is a complete list of messages and their explanations.
Ready to fly
The vehicle has found no errors and is ready to fly.
Left wing not detected
The left wing is not detected. Please attach the left wing.
Right wing not detected
The right wing is not detected. Please attach the right wing.
Reverse payloads
The heaviest payload should be in the rear (slot 1). This message indicates that the payloads should be reversed. The payload in slot 1 should be installed in slot 2 and vice versa.
No payloads found
The software has not found any payloads. When flying without payloads the empty payload boxes (placeholders) need to be installed.
Slot 1: No payload
No payload was found in slot 1 (rear payload). Both payloads should be occupied. With a dual payload, this message should not appear.
Slot 2: No payload
No payload was found at slot 2 (front payload). Both payloads should be occupied. With a dual payload, this message should not appear.
Slot 1 not Configured
The payload printed circuit board (PCB) for the payload in slot 1 has not been programmed.
Slot 2 not Configured
The payload printed circuit board (PCB) for the payload in slot 2 has not been programmed.
Balancing Error XXmm
The payload makes the vehicle to nose or tail heavy and cannot offset the center of gravity (CG) with the nose battery (between -5 and +35 is ok).
Automatic balancing
The system is balancing the vehicle by moving the nose battery fore or aft.
Arming denied: XX
Arming UAV is denied because of reason XX.
Battery not fully charged
Battery level below 80%.
Nose battery moved XX mm
The vehicle moved the nose battery XX mm to offset the imbalance caused by the payloads.
Payload to heavy
The total payload weight is above 3000 grams. This is not within vehicle specifications.
Updating params
The vehicle parameters are being updated to accommodate the payloads.
Writing parameters failed
There was an error while writing the parameters.
Automatic Vehicle Balancing
Each payload box carries information about its weight and weight distribution. This information is stored on the I/O board of the payload box.
Depending on the installed payloads, the DeltaQuad Evo will automatically balance itself by moving the main battery tray either forward or backward.

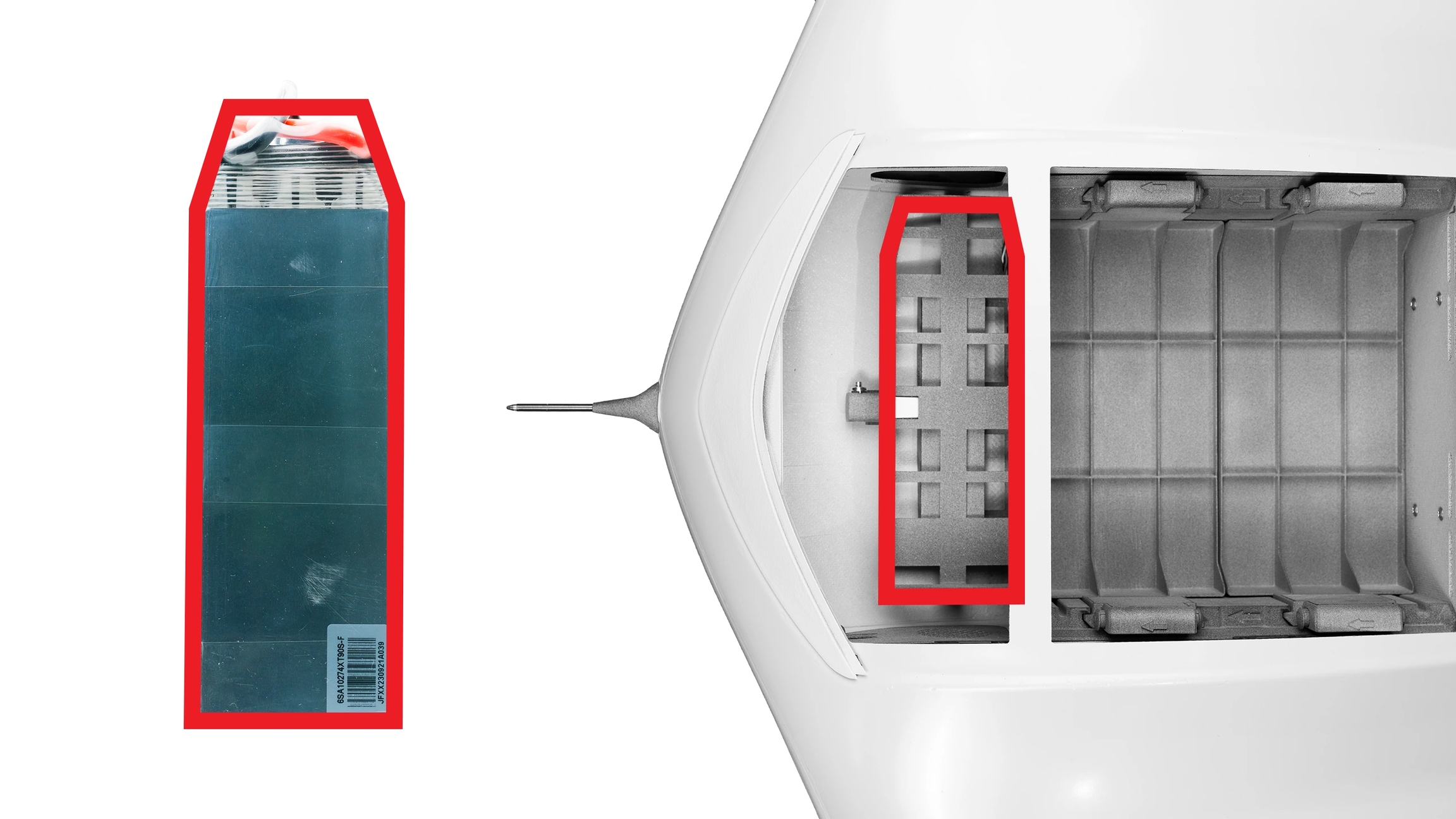
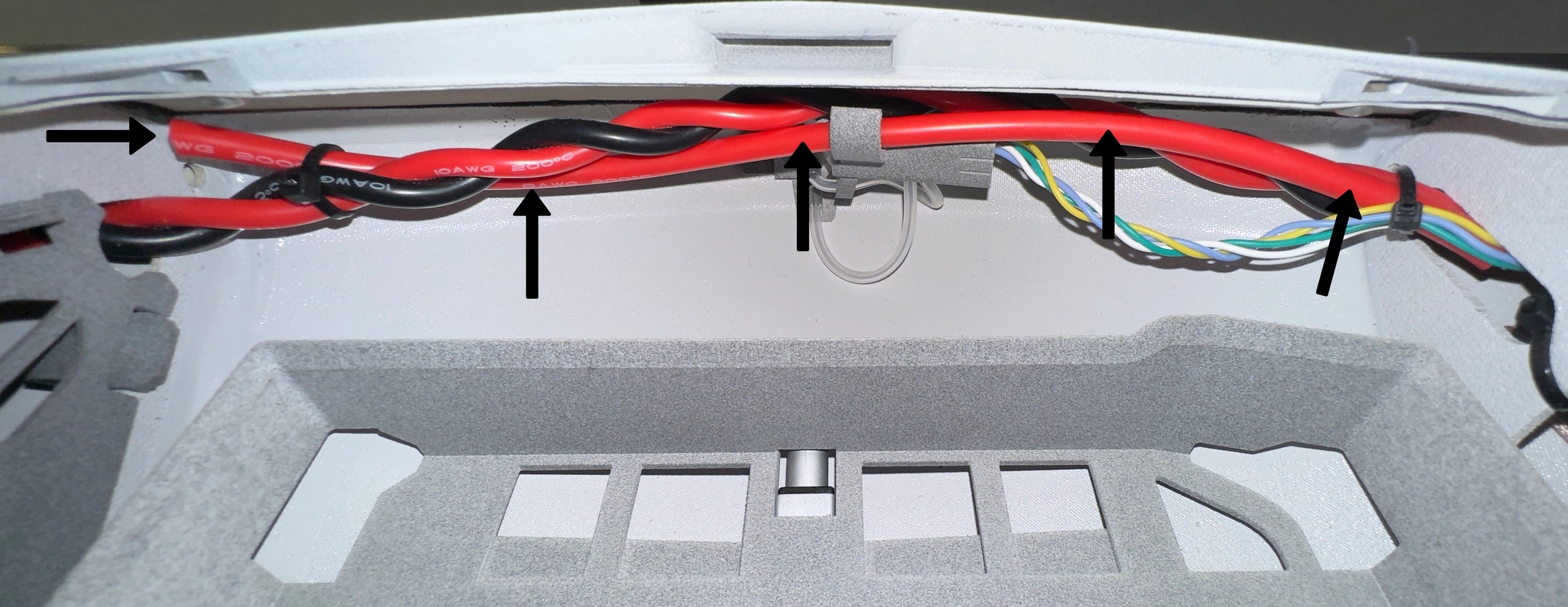
Extra Nose Weight
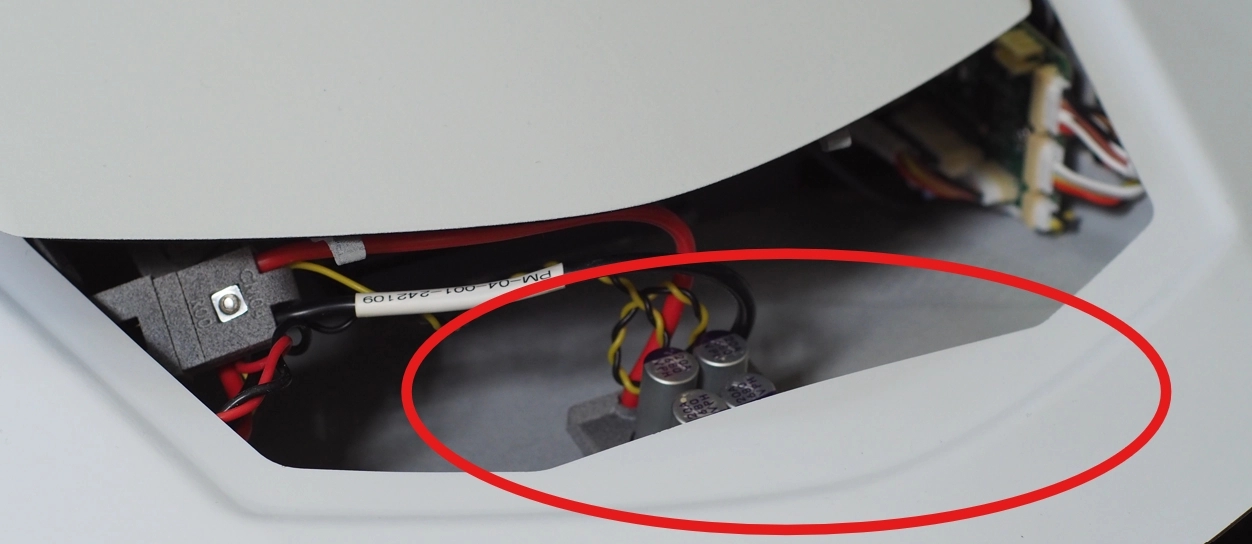
As the Silvus air unit and the hardened GPS add extra weight, a counterweight in the nose is required to balance the vehicle. This is achieved using a short cable, zip-tied to the power loom in the battery compartment of the vehicle.
This open cable is not under load and does not pose any safety hazard.
DeltaQuad Evo Payload Slot Layout
Slot 1: Located at the rear end of the fuselage, closest to the pusher propeller.
Slot 2: Located at the front end of the fuselage, closest to the nose of the vehicle.
Dual Battery Configuration
Always ensure that both batteries are connected and that the XT90 connectors are fully seated in their respective sockets.
Ground Control Station (GCS)
This chapter discusses the GCS, its components, and how to assemble it.
The transmission and control system of the DeltaQuad Evo Tactical includes three essential components: a radio modem and antenna(s), and a Toughbook with a hand controller.

There are two antenna options available:


DeltaQuad Toughbook
The following section provides a basic overview of the DeltaQuad Toughbook, and the handheld controller.

To charge the Toughbook, please use the provided power adapter.

The handheld controller enables manual override, precision landing, and camera gimbal control during fixed-wing flight.

To connect the handheld controller to the Toughbook, plug the USB connector of the controller to any of the USB ports of the Toughbook.


Number
Type
Function
1
Left joystick
In hover mode
Stick up: climb
Stick down: descend
Stick left: yaw left
Stick right: yaw right
In fixed-wing mode (payload dependent)
Stick up: gimbal up
Stick down: gimbal down
Stick left: gimbal left
Stick right: gimbal right
2
Right joystick
In hover mode
Stick up: move forward
Stick down: move backward
Stick left: move left
Stick right: move right
In fixed-wing mode
Stick up: descend (nose down)
Stick down: climb (nose up)
Stick left: bank left
Stick right: bank right
3
Shoulder buttons L1 and R1
Gimbal zoom for ISR payloads
Silvus StreamCaster 4240-EP
The following chapter gives a basic overview of the Silvus StreamCaster 4240-EP.
Chapter Index:
The DeltaQuad Evo TAC/TAC+ comes with the Silvus StreamCaster 4240-EP, which consists of a handheld radio modem, two omnidirectional antennas, and a detachable battery. A breakout cable is included to establish the connection to the DeltaQuad Toughbook.

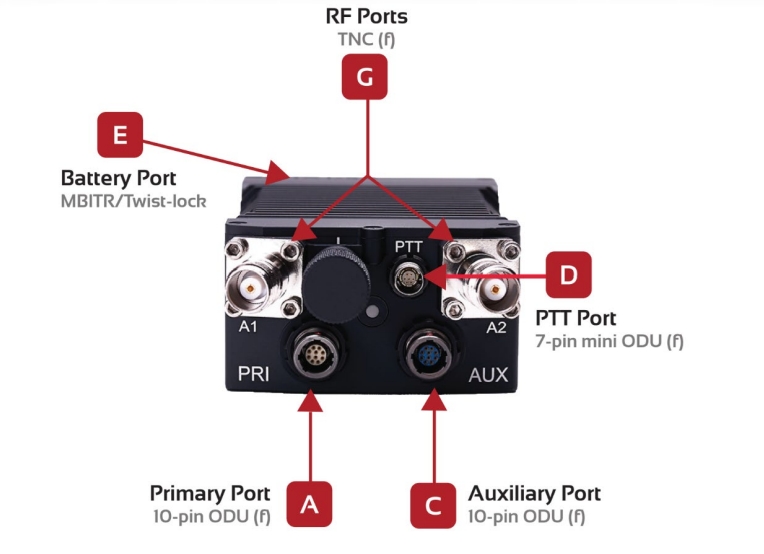
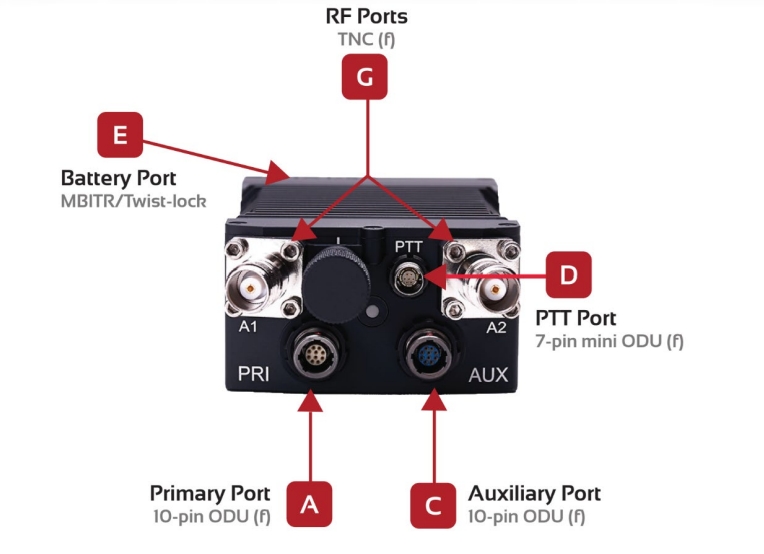
At the top of the radio modem, you find the following connections:
Attaching the Battery
This section describes how to attach the Silvus battery to the radio modem.
Take the Silvus StreamCaster 4240-EP and the Silvus battery out of the upper right compartment of the flight case.

Connect the top of the battery to the bottom of the radio modem.

Align the battery in a 45-degree angle.

Connect both units and turn to align them. The battery locking mechanism will make an audible click sound.


Attaching the Antennas
This section describes how to attach the antennas to the radio modem.
Remove the two protective caps from the RF ports (G).
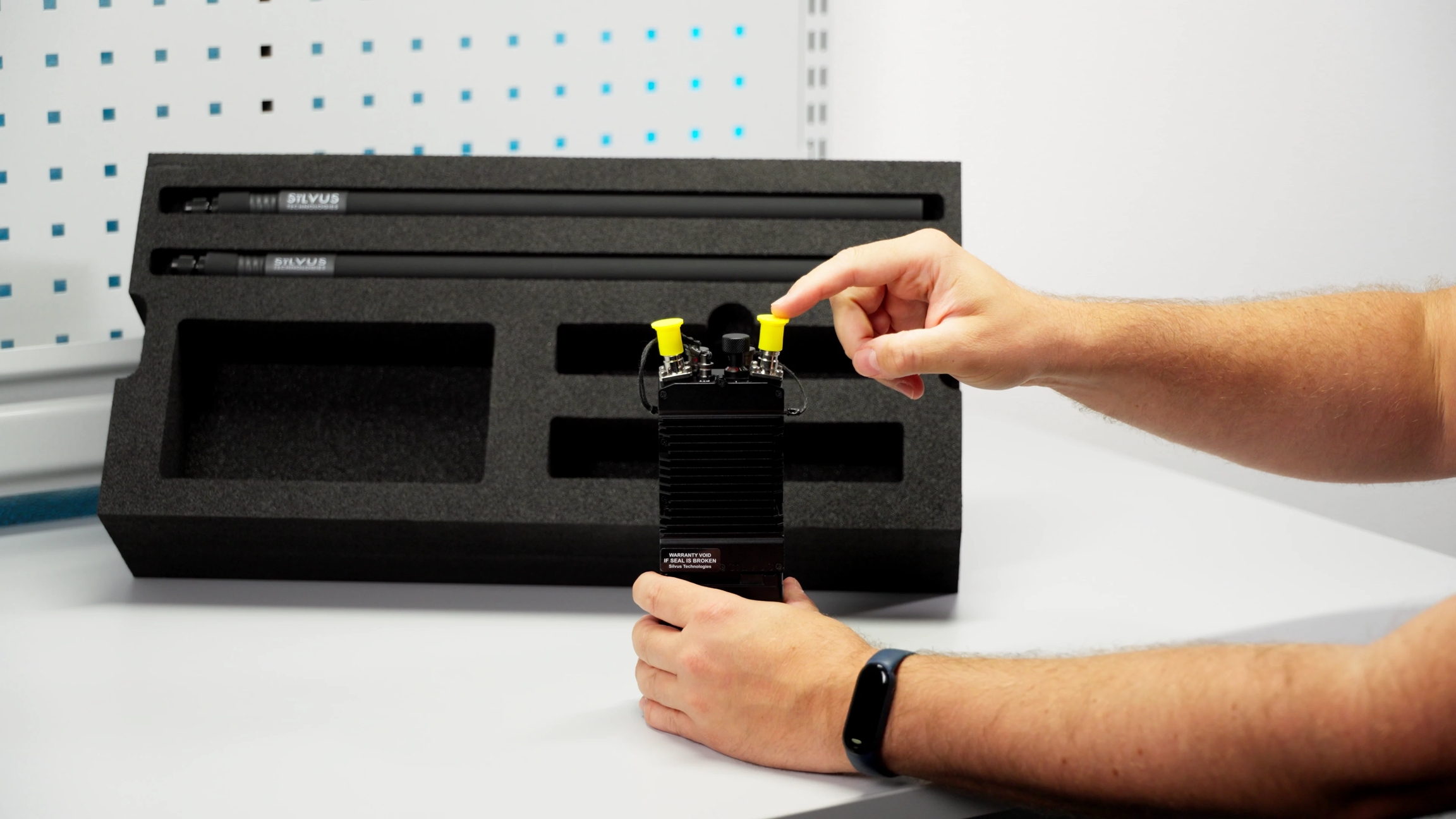
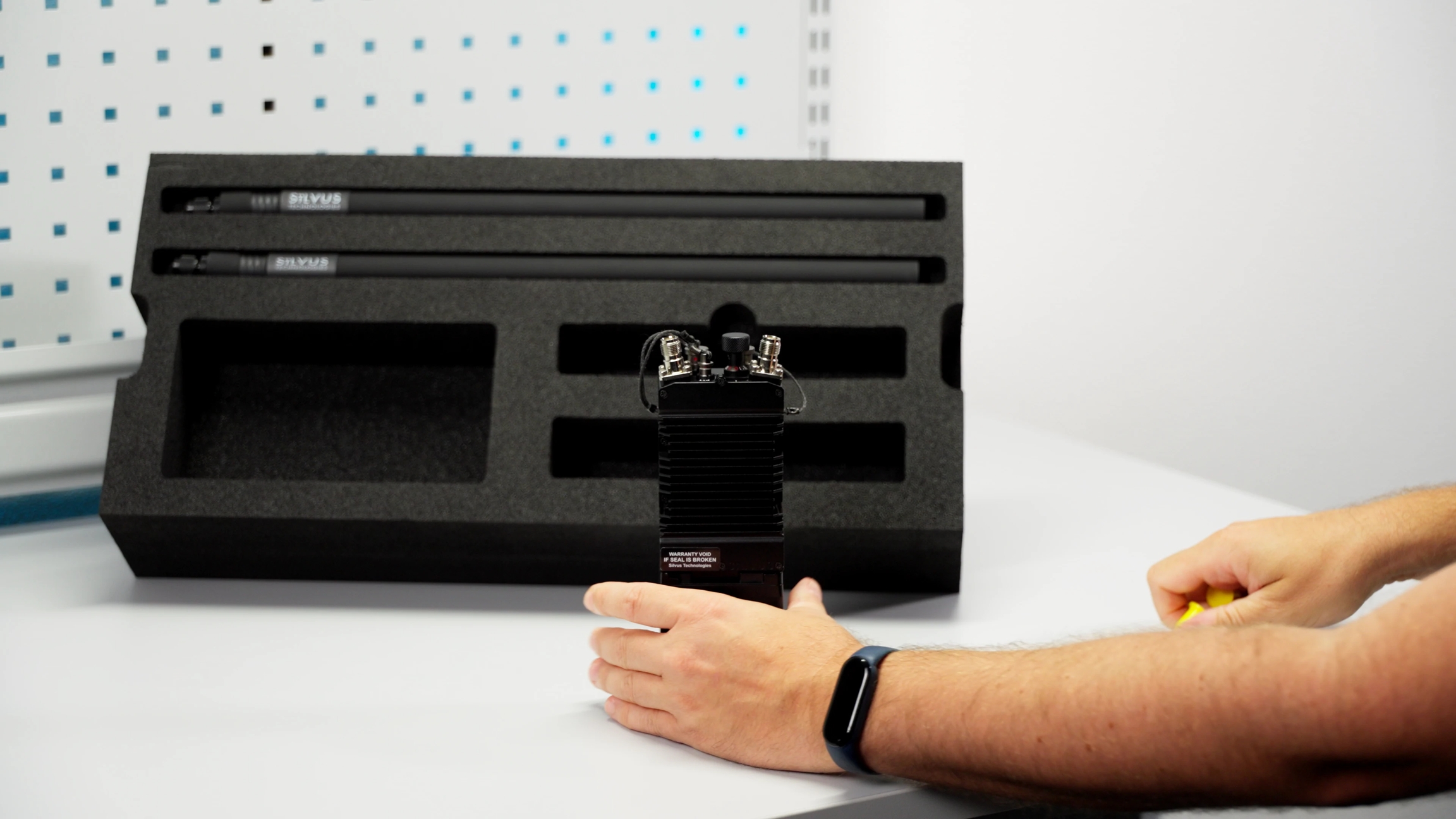
Remove the Silvus antennas from the upper right compartment of the flight case, and connect the two antennas to the RF ports (G).



Charging the Silvus Battery
This section describes how to charge the Silvus battery.
Take the Silvus charging dock and the charging cable out of the lower right compartment of the flight case.

Connect the power adapter to the charging dock.

Connect the power adapter to a power outlet.
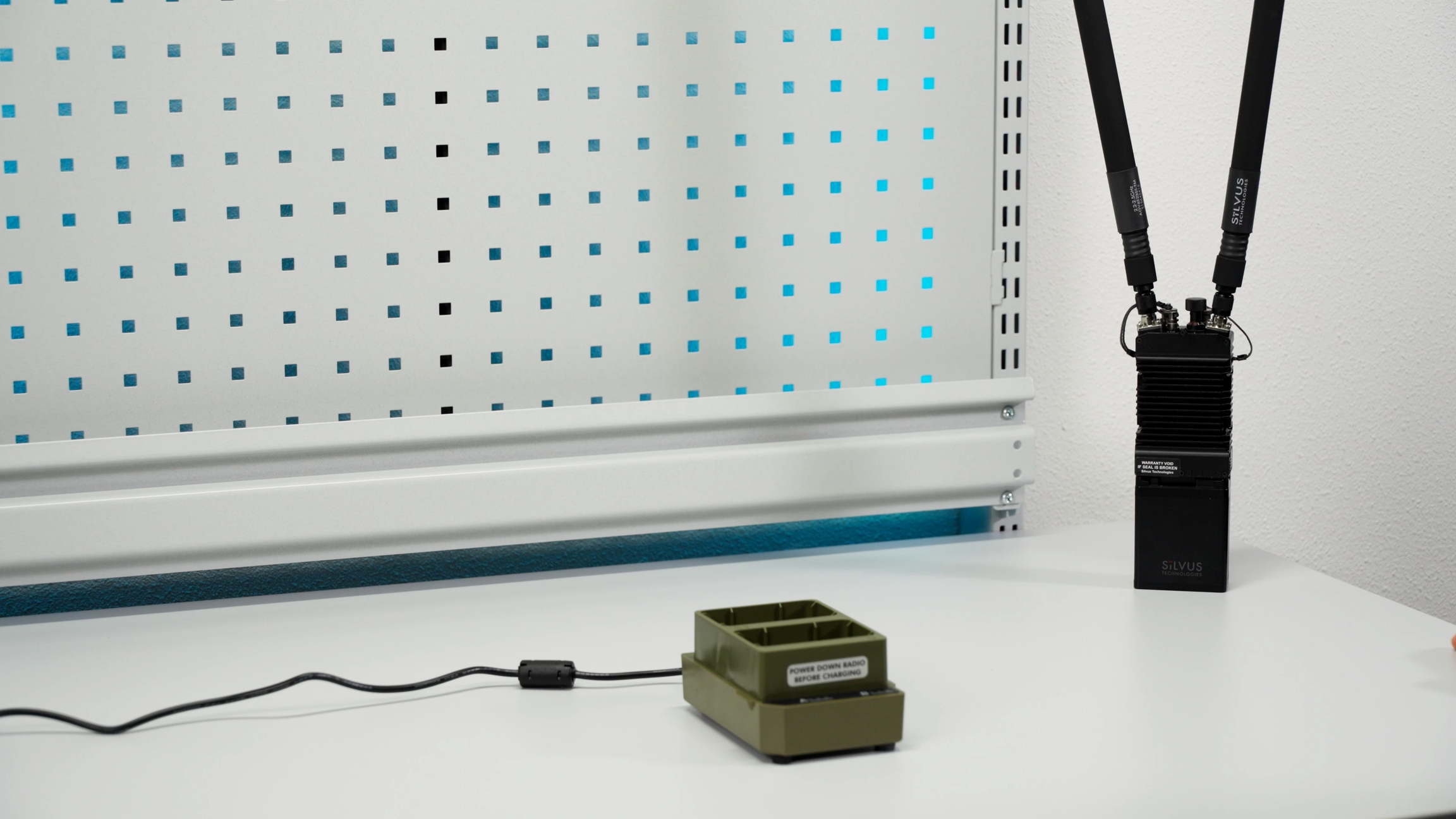
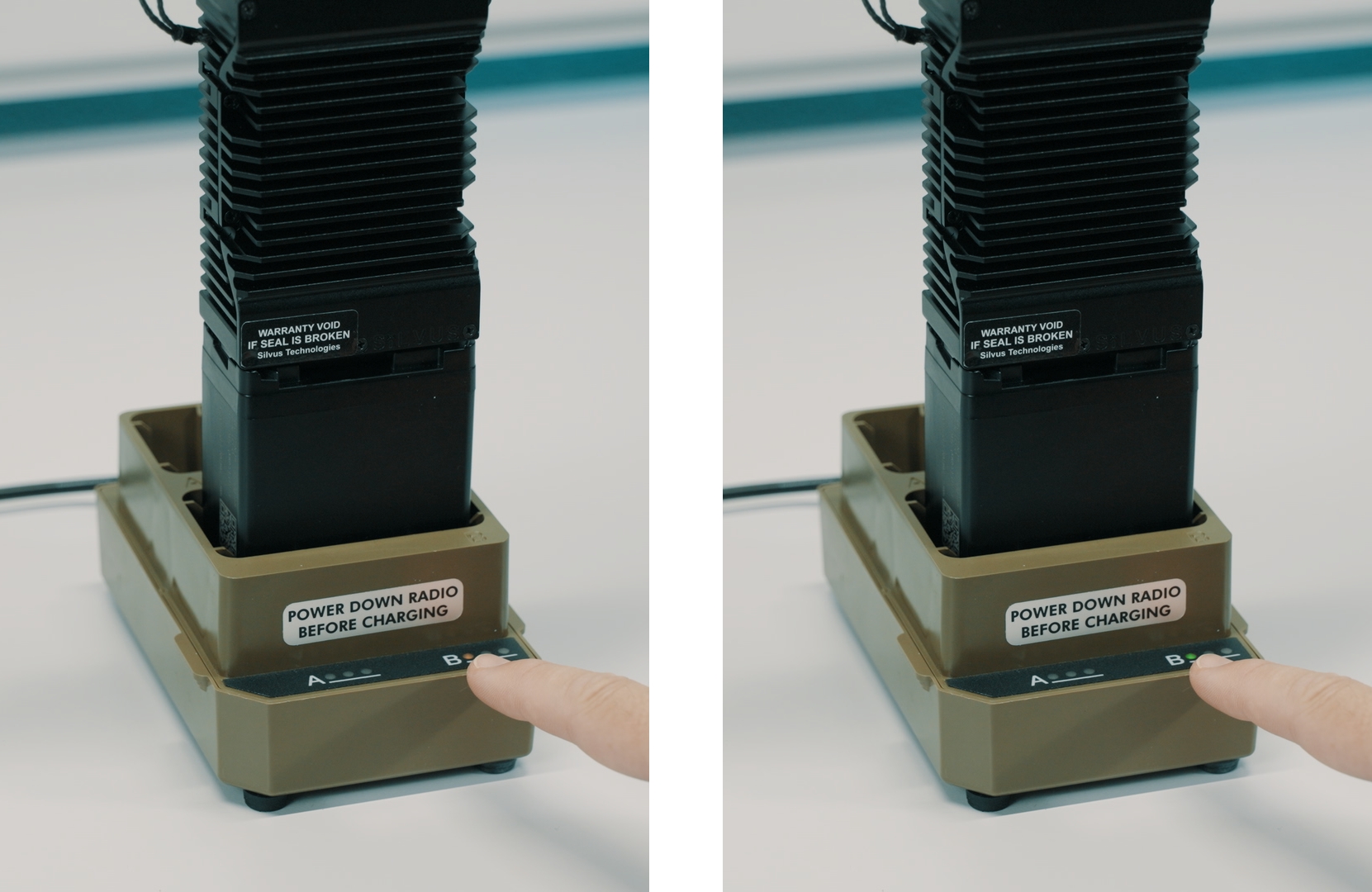
The Silvus battery can be charged either while assembled with the radio modem and antennas or by charging the battery alone. Place the unit in one of the available charging slots (A or B) in the charging dock.
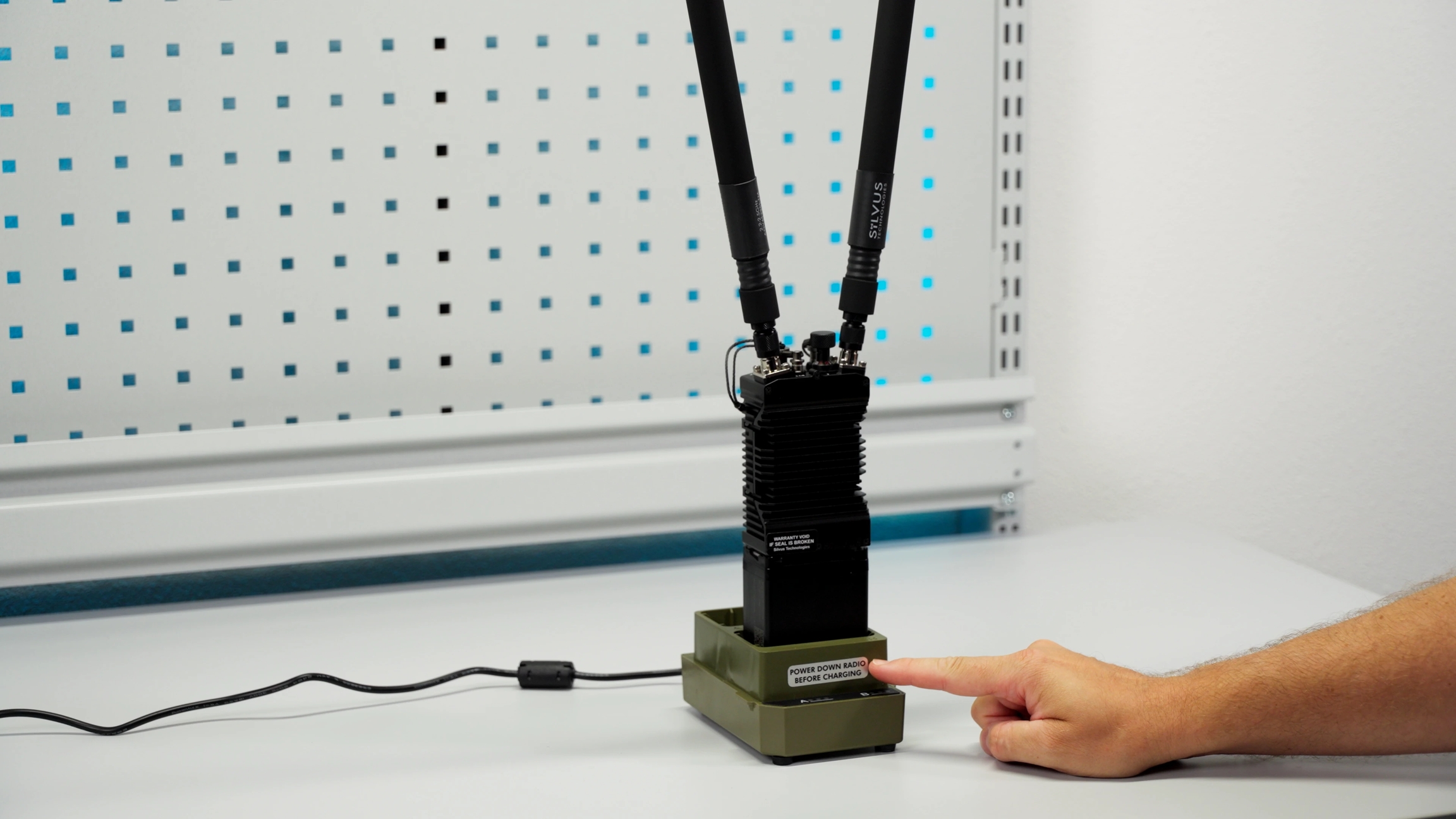
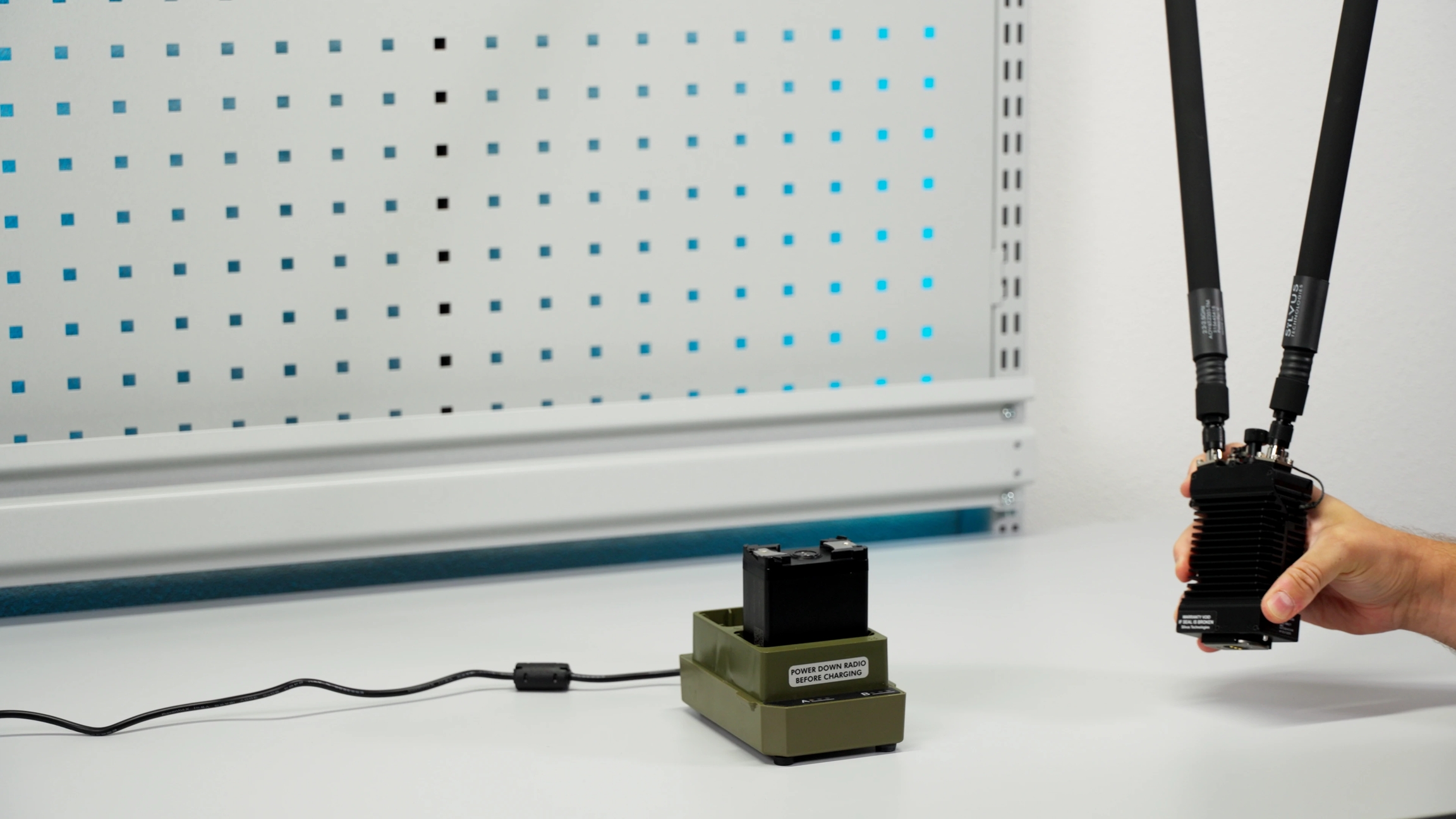
When charging the radio in its fully assembled state, make sure to power down the radio before charging.
Connecting the Breakout Cable
This section describes how to connect the breakout cable to the radio modem.
The Silvus StreamCaster comes with a breakout cable.

Remove the protective cap from the Primary Port (PRI).


Connect the end of the cable with one plug to the PRI Port on the radio modem.

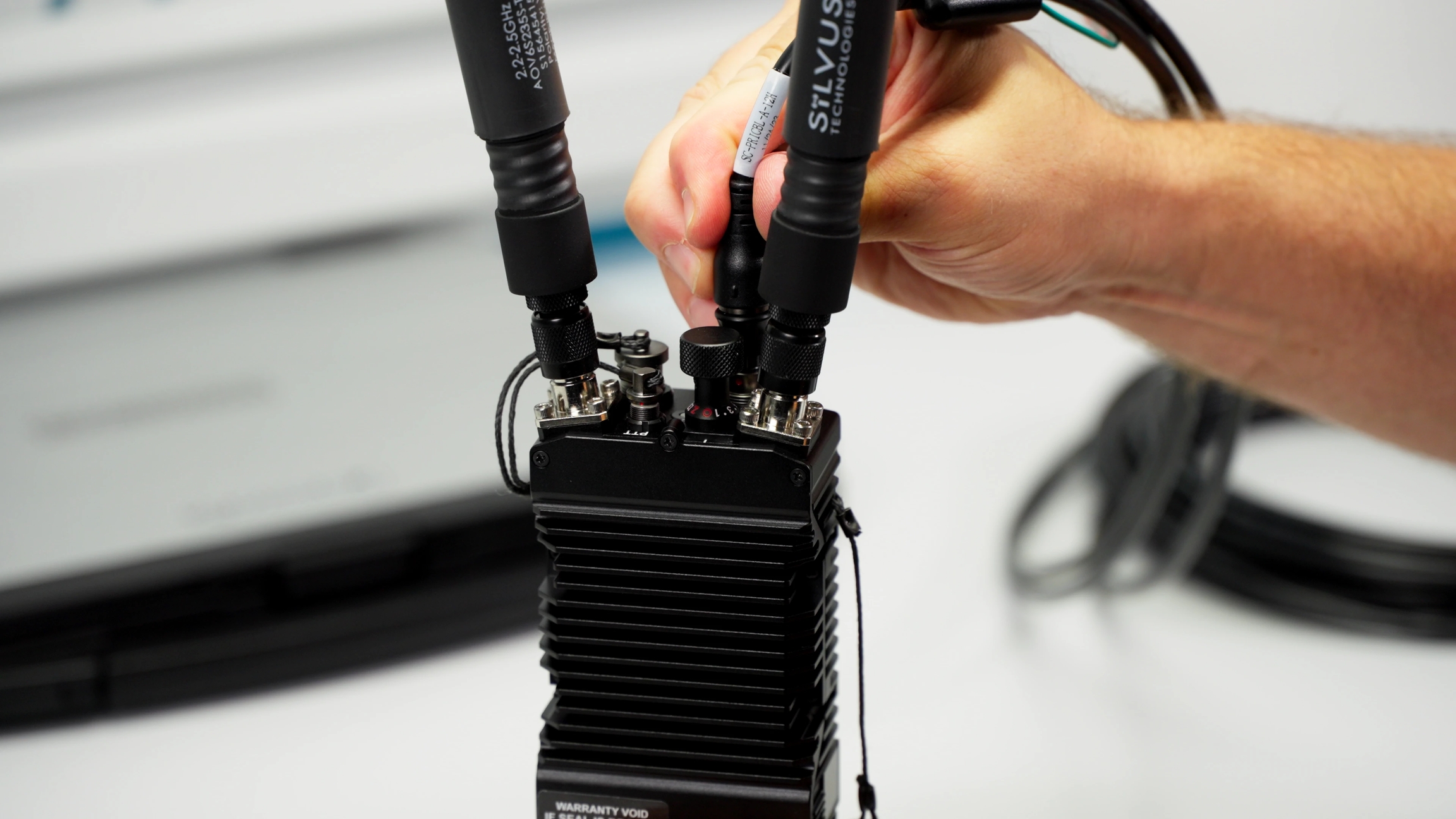
To properly connect the plug to the socket, ensure that the red dots on both are aligned.

To detach the cable for storage, simply pull the plug out of the PRI socket by gripping the base of the plug and pulling it upward.

Storing the Silvus StreamCaster
This section provides important information on how to properly store the Silvus StreamCaster 4240-EP.
When disassembling and storing the Silvus StreamCaster, it is best practice to detach the Silvus battery from the radio modem and store both items separately in their designated flight case compartments.
Important Guidelines for Storing the Silvus StreamCaster 4240-EP:
Never store the Silvus StreamCaster in the flight case while powered on and with the antennas detached. The high transmission power can cause significant damage to the radio module, particularly when the antennas are not installed.
Reflected Power and Overload: When a radio modem transmits, the energy must be radiated through the antenna. Without an antenna, the transmitted power has nowhere to go and reflects back into the radio’s circuitry, especially the transmitter. This can lead to overheating or damage to critical components, particularly the power amplifier.
Impedance Mismatch: Antennas are designed to match the radio modem's impedance. Without an antenna, a significant impedance mismatch occurs, preventing the efficient transfer of RF energy. This mismatch causes high voltage standing wave ratios (VSWR), which can result in damage to the modem.
The Silvus StreamCaster 4240-EP is equipped with advanced features like automatic power control, designed to protect the system in situations where the antennas are not properly connected. This feature, known as power throttling, reduces transmission power to prevent damage to internal components in the event of an antenna connection issue. Additionally, the device may issue warnings or errors if it detects that the antennas are not attached, further reducing the risk of damage due to reflected power.
However, even with these safeguards in place, it is still best practice to avoid powering on the radio without the antennas properly installed.
While power control features help protect the device, they are not a guarantee against potential damage if the issue persists.
Connecting the GCS to the DeltaQuad Evo
The following section describes how to establish a connection between the GCS and the DeltaQuad Evo GOV.
Before connecting the GCS to your UAV, the Silvus StreamCaster must be connected to the Toughbook, and both items must be switched on.
Follow the instructions in the chapter Silvus StreamCaster 4240-EP on properly setting up the radio module.
Connect the Ethernet plug from the Silvus breakout cable to the Ethernet port on the Toughbook.

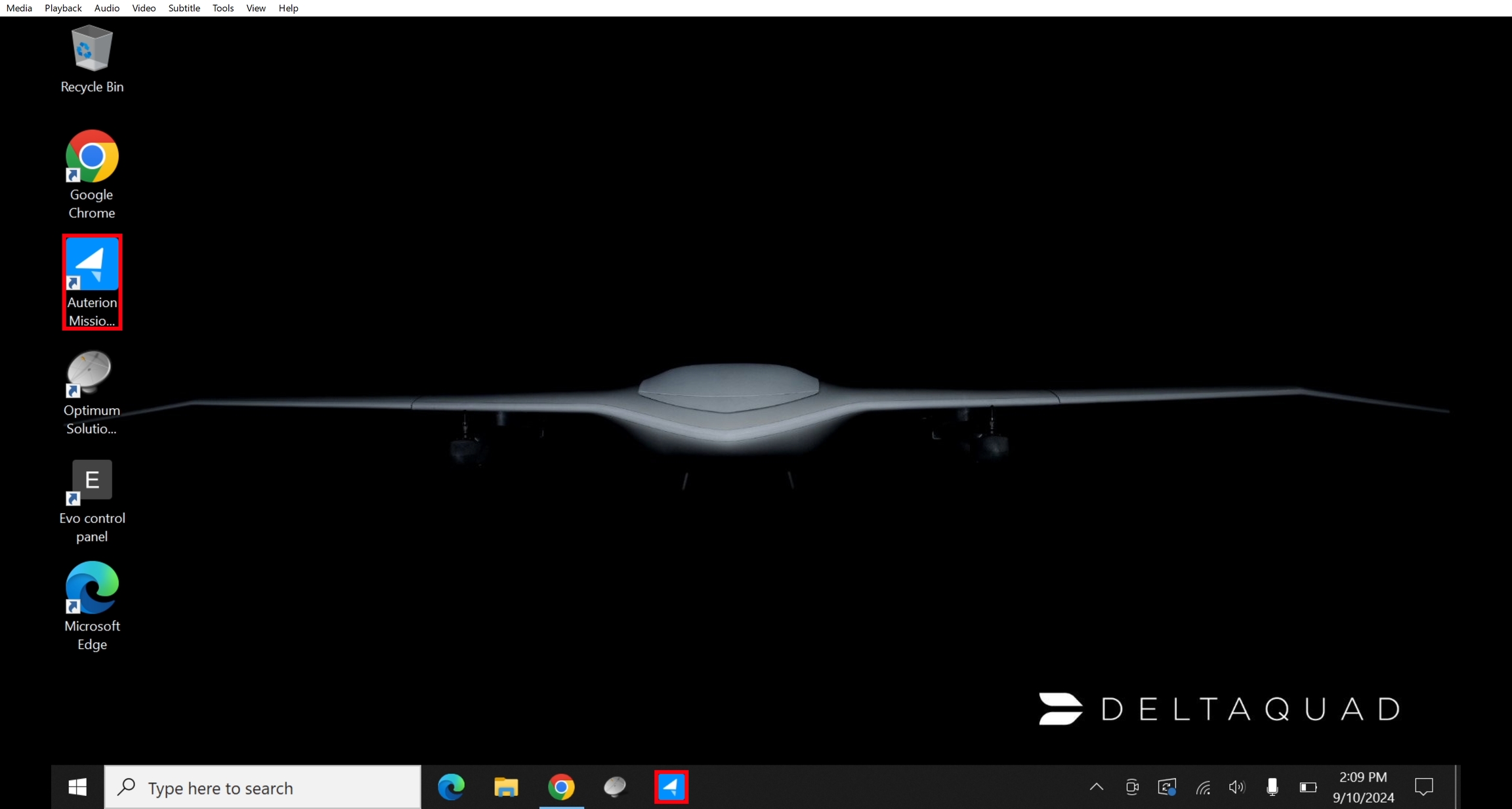
Open the Toughbook, and turn it on.

Start the application Auterion Mission Control (AMC).
Pull out the rotary knob on top of the Silvus radio modem and set it to 1.


Do NOT set the dial of the rotary knob to Z, as this is resetting the radio to its default settings. This makes the radio unusable.
The Silvus StreamCaster 4240-EP is configured and set up properly in our factory. There is no need for further configuration. The system is plug-and-play ready.
Switch on the DeltaQuad Evo. Follow the steps described in the chapter Powering the Vehicle.
During initialization, the GCS and the DeltaQuad Evo automatically establish a connection. The bi-color Status LED on the Silvus radio modem should change from red to green.


Red
The radio is in the process of booting up.
Flashing Green
The radio is fully booted but not wirelessly connected to the vehicle.
Green
Spectrum Scan is in Progress. Connection to the vehicle has been established.
Flashing Red
Radio has recovered from a bad state and has reverted to factory default settings.
Rapid Flashing Red for 1 second
The battery is less than or equal to 20%. LED will blink red rapidly for 1 second then go back to normal. This will repeat every 5 seconds.
Rapid Flashing Green
When the multi-position switch is rotated to a new position, the LED will rapidly flash green while the new settings are being applied. The LED will return to normal indication once the settings have been applied.
In the upper left corner of AMC, the vehicle status indicator will show the connection status to the DeltaQuad Evo. When the indicator is green (Ready to Fly), the vehicle is ready for takeoff.
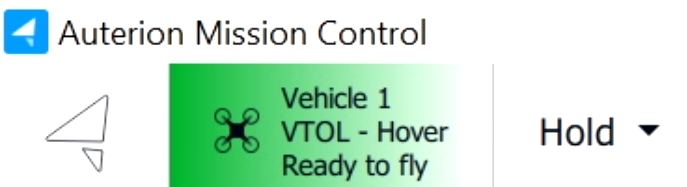
The connection between the GCS and the DeltaQuad Evo has been established.
Optional Tripod-Mounted Sector Antenna
The following section outlines the basic assembly and operation of the tripod-mounted sector antenna.

Assembly
Mount and secure the sector antenna on the provided tripod.




At the top of the tripod pole, there are ridges that fit the antenna holder, providing more stability for the antenna mount.

Extend the antenna away from the tripod pole during the radio installation.

Connect the battery to the Silvus StreamCaster as described here.
The Tripod-Mounted Sector Antenna comes with two coaxial antenna cables. Connect the smaller coaxial plugs to the RF Ports (G) of the Silvus StreamCaster.


Velcro is attached to the back of the Silvus handheld radio. Install the radio onto the corresponding Velcro on the backside of the sector antenna.

Connect the other end of the antenna cables to the RF ports of the sector antenna.


Special care must be taken when connecting the antenna cables to the Silvus handheld radio and the sector antenna. Ensure that the connection is secure and that the plugs are fully seated.
Connect the Silvus breakout cable to the Silvus StreamCaster as described here.

Please follow these steps to establish a connection between the GCS and the vehicle.
Positioning the Tripod-Mounted Sector Antenna
For general information and tips on radio range and line-of-sight operation, please read here.
The optimal angle for a sector antenna to operate effectively with a drone depends on several factors, including the antenna’s beamwidth and the drone’s flight path. A sector antenna typically has a directional beam covering a specific angular range, known as the beamwidth.
The provided tripod-mounted sector antenna has a horizontal beamwidth of 120 degrees and a vertical beamwidth of 12 degrees.
The vertical angle of the sector antenna can be changed by adjusting the lower extender arm. It features a degree scale for precise adjustments.

Consider the following:
Antenna Beamwidth: Sector antennas have a defined beamwidth within which the main lobe of the radiation pattern operates. Align the antenna so that the main lobe covers the area where the drone is expected to operate most frequently.
Drone Flight Path: Take into account the expected flight path of the DeltaQuad Evo Tactical. If the drone will operate within a specific sector, align the antenna to cover that sector. It’s common to point the sector antenna slightly upward, depending on the drone’s altitude.
Altitude Changes: If the drone is expected to fly at various altitudes, adjust the tilt of the sector antenna to ensure consistent coverage across different heights.
Here is a table showing the necessary elevation angles (in degrees) for the antenna at different altitudes (HGT - relative to the takeoff location) and distances from the GCS, assuming that the GCS and antenna are placed close to each other near the takeoff location (values can be rounded up or down):
500
2.86°
1.43°
0.95°
0.72°
1000
5.71°
2.86°
1.91°
1.43°
1500
8.53°
4.29°
2.86°
2.15°
2000
11.31°
5.71°
3.81°
2.86°
2500
14.04°
7.13°
4.76°
3.58°
3000
16.70°
8.53°
5.71°
4.29°
3500
19.29°
9.93°
6.65°
5.00°
4000
21.80°
11.31°
7.59°
5.71°
4500
24.23°
12.68°
8.53°
6.42°
5000
26.57°
14.04°
9.46°
7.13°
5500
28.81°
15.38°
10.39°
7.83°
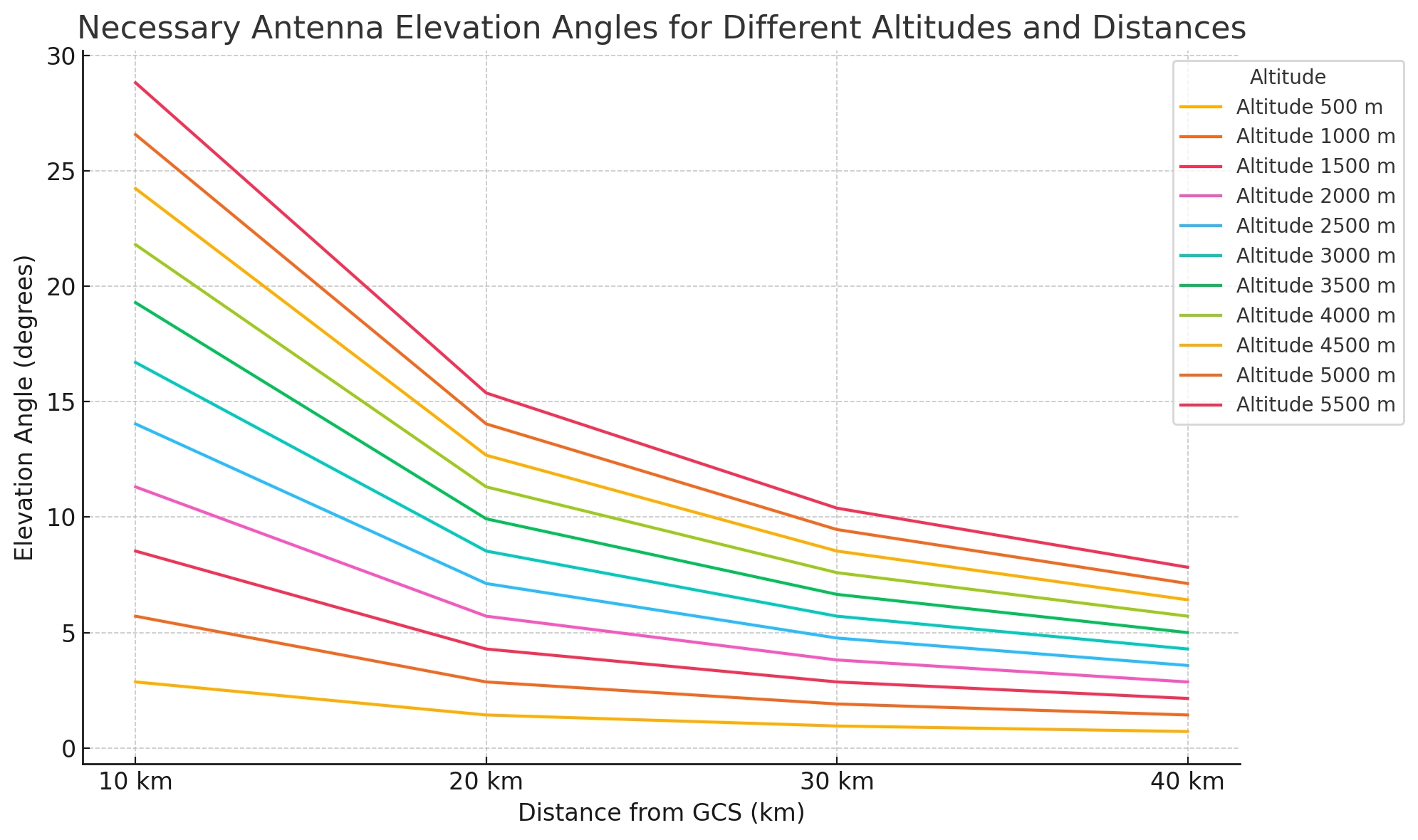
This table gives the required vertical alignment for the sector antenna to cover the vehicle flying at altitudes between 500 meters and 5500 meters at varying distances (10 km, 20 km, 30 km, and 40 km).
The following is a graph representing the necessary antenna elevation angles for different altitudes and distances from the GCS. The x-axis shows the distance from the GCS, and the y-axis shows the corresponding elevation angles in degrees for various altitudes ranging from 500m to 5500m. Each line represents a specific altitude and shows how the required elevation angle changes as the UAV moves farther from the GCS.
Obstructions: Be aware of any potential obstructions between the antenna and the drone. Adjust the antenna angle to avoid obstacles and maintain a clear line of sight.
Coverage Area: Determine the desired coverage area and adjust the sector antenna’s angle accordingly. Sector antennas are typically used to cover specific sectors of a 360-degree area.
Silvus StreamCaster GUI
This section will explain how to access the Silvus StreamCaster GUI for optional changes.
All Silvus radios come preconfigured and are ready for immediate use. Changing the settings is recommended only for advanced users.
Each Silvus radio modem has a dedicated IP address consisting of four octets separated by periods. For example 172.20.123.123.

On the Toughbook, open a browser. In the address bar, enter the IP address of the radio modem and press Enter.
The battery level of the radio modem is displayed in the top right corner of the GUI's menu bar.

Critical battery levels are indicated by the radio modem's LED. For more information, please refer to the following section.
After a few seconds, the browser should display the Silvus StreamCaster GUI. Navigate to the tab Local Radio Configuration -> RF -> Basic to access the basic radio frequency settings. Here, you can configure parameters such as Frequency, Bandwidth, and Total Transmission Power.
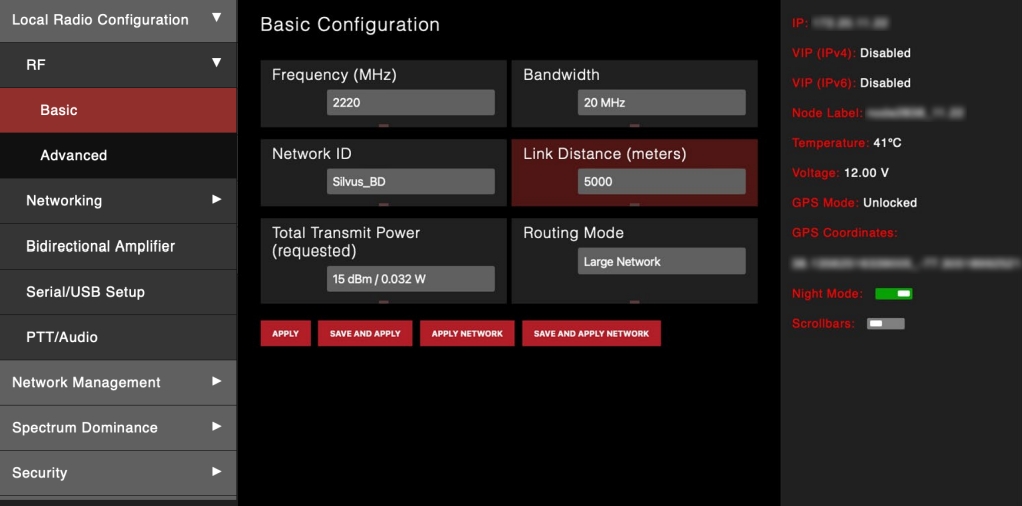
To ensure proper functionality, all changes must be applied to both the handheld radio and the DeltaQuad Evo. To save and apply changes to both devices, make sure they are powered on and connected. Selecting SAVE AND APPLY TO NETWORK will store the changes in both devices, preserving them even after a reboot. Using APPLY will only apply the changes temporarily until the next reboot.
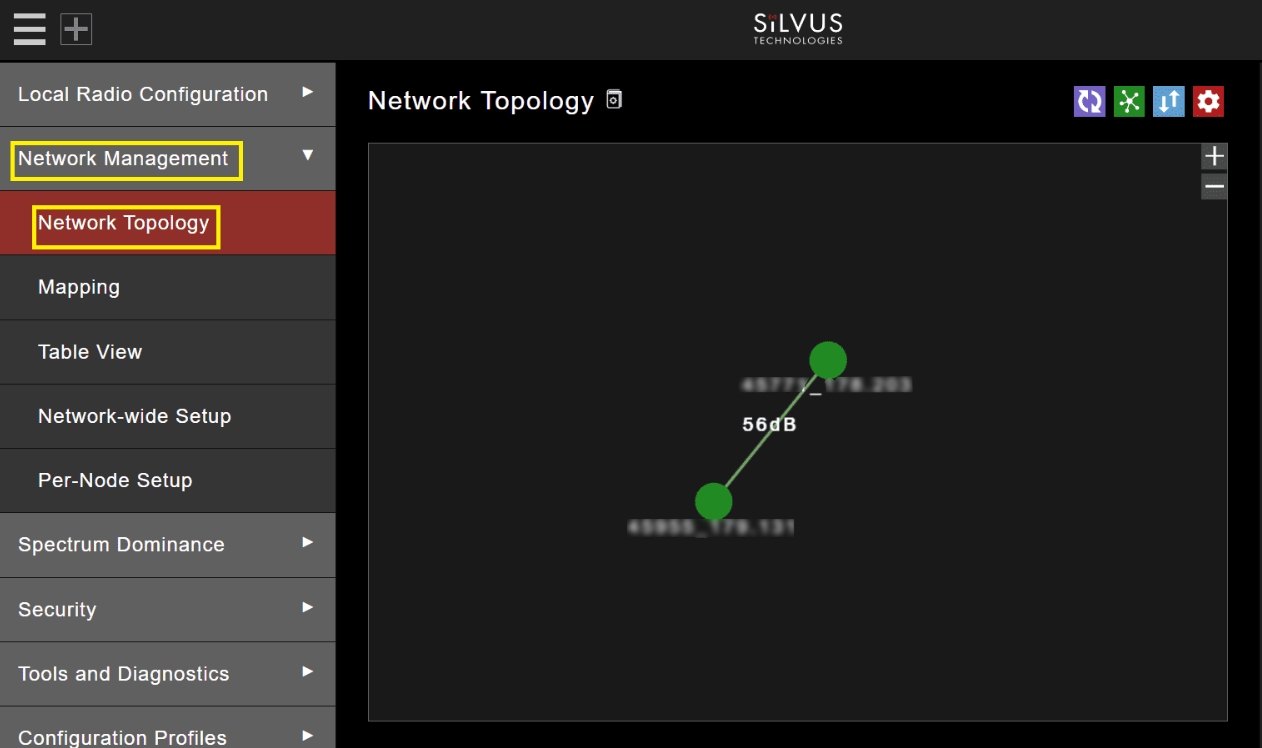
Under the tab Network Management -> Network Topology, you can view the individual nodes along with their signal strength.
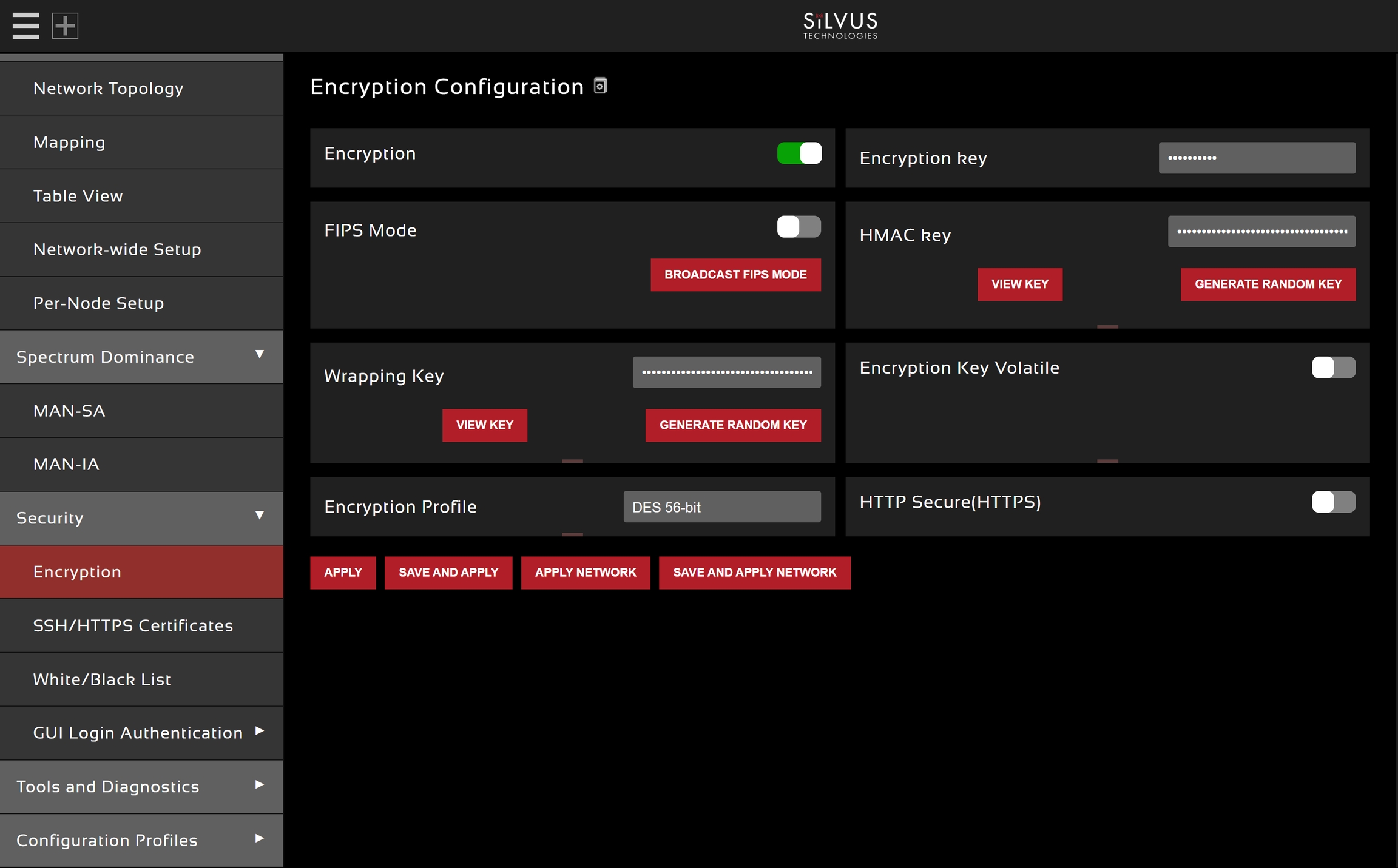
Under the tab Security -> Encryption, you can configure the security keys.
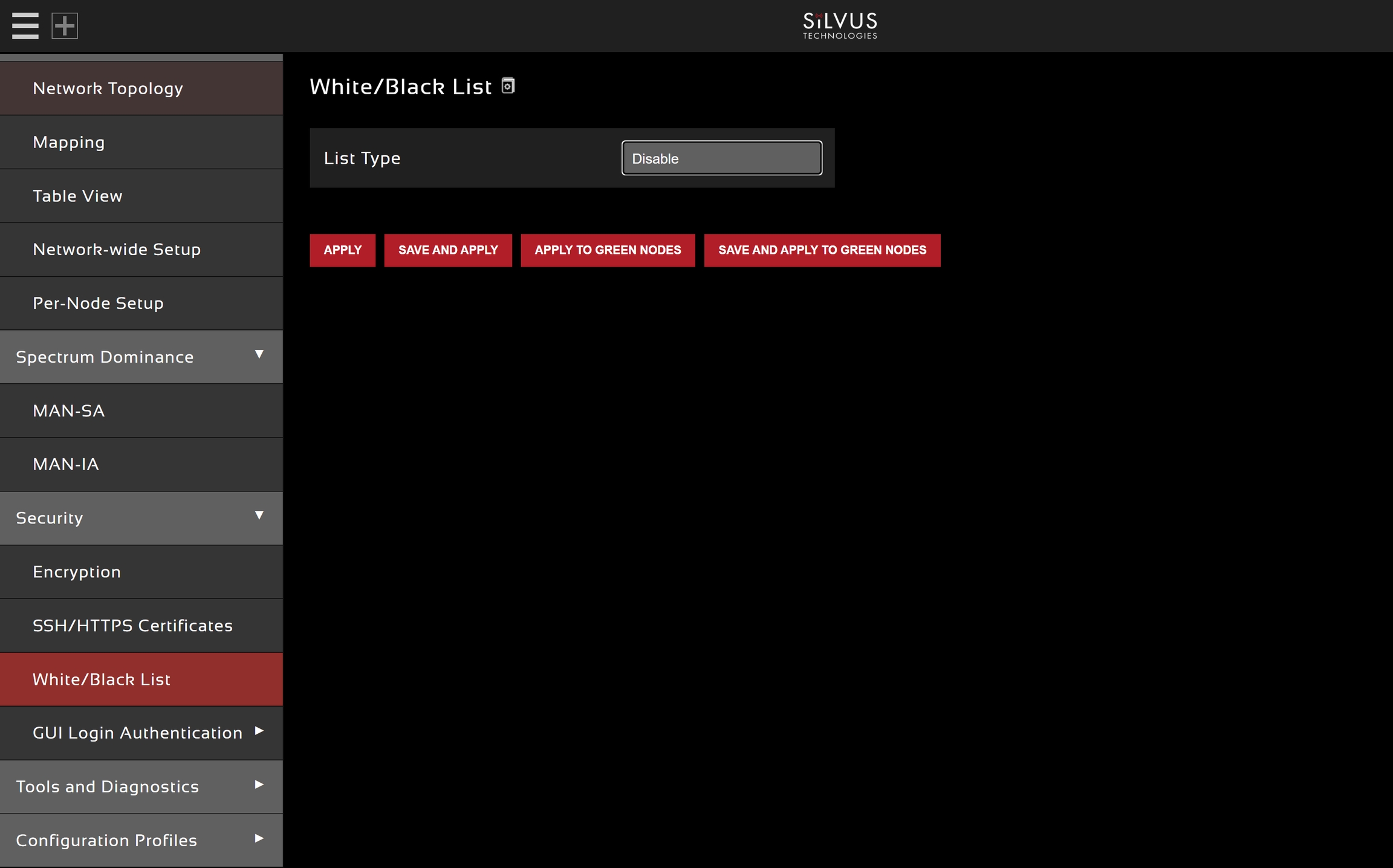
Under the tab Security -> White/Black List, you can create either a white list or a black list. A black list can block specific nodes from accessing the network, while a white list specifies which nodes are allowed to access the network.
Changing the Radio Encryption
The following section explains how to change the encryption settings for the Silvus radio network.
This guide will help you configure the encryption settings for the Silvus radios in the DeltaQuad Evo GOV to meet your needs. Following these steps will ensure secure communication and protect your data from unauthorized access and cyber threats.
The Silvus radio in the DeltaQuad Evo GOV comes with encryption enabled by default. DeltaQuad uses randomized encryption keys that are not recorded. It is the operator's responsibility to modify the radio encryption to meet the specific operational requirements.
Encryption is crucial for securing data transmitted between drones and ground stations. It protects sensitive information, such as video feeds and control commands, from unauthorized access. By employing encryption, you can guard against cyber threats, eavesdropping, and tampering, thereby maintaining the integrity and confidentiality of your communications.
The DeltaQuad Evo GOV supports the DES 56-bit encryption protocol.
Setting Up Encryption
Access the Configuration Interface:
Connect to the Silvus radio through a web browser using the radio's IP address. A connection guide can be found here.
Navigate to the Security Settings:
Locate the security settings tab and click on Encryption.
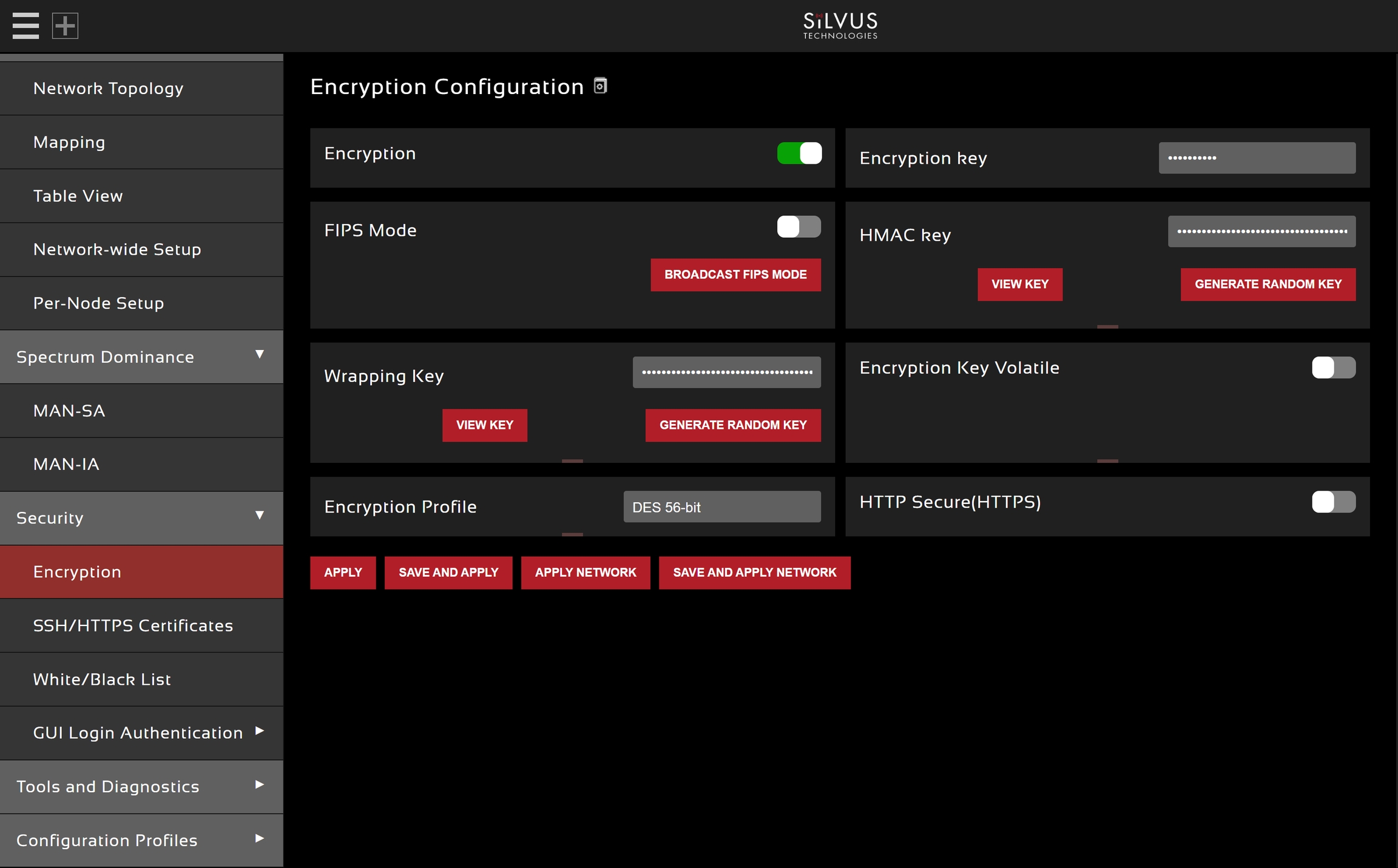
Select the Encryption Protocol:
Choose the desired AES encryption level (56, 128, or 256-bit) from the dropdown menu or selection box.
Generate a Wrapping and HMAC key and input Encryption key:
Click on the respective fields to generate a Wrapping and HMAC key. The system does not store these keys for security reasons. They are randomly generated based on the chosen encryption method.
Click on the field to input the Encryption key. Enter your encryption key, ensuring it meets the protocol requirements for length and complexity. The system does not store this key for security reasons.
Save and Apply Settings:
After configuring the encryption settings, ensure that you save and apply these settings not only on the device you are currently configuring but also across the entire network. This means applying and saving the settings for all radios, both ground and air units, to ensure uniform encryption across all communication links.
Testing and Verification:
Perform a communication test to ensure that the encryption is working correctly. Verify that data transmission is secure and that there are no connectivity issues.
Regularly update and manage encryption settings to adapt to evolving security needs and maintain robust protection against cyber threats.
Remote Identification (RID)
This section explains how to configure RID on the GSC.
Connect the USB-GPS module to the Toughbook.



Open Auterion Mission Control (AMC).

Open the Vehicle Overview by clicking on Vehicle Status in the upper-left corner of AMC.

Open the RemoteID tab and verify that the Status is Operative.

If the GPS location of the GCS is not available, the Vehicle Status will be red, and arming is not possible.
There is an option to use a fixed station position. The operator must verify that this option complies with the laws and regulations of the country where the vehicle is operated. For example, in the United States, using a fixed position is not allowed. A continuous update of the GCS location must be provided.
When using the fixed station position option, the operator must provide the latitude, longitude, and altitude of the GCS.

ATAK-Setup
The following section explains how to connect and set up an ATAK device.
Required Hardware
Ground Control Station (GCS)
Data-Link
Ethernet Switch
Android device with ATAK installed (Application is available in the Google PlayStore)
Procedure
Connect the Ground radio to the Ethernet switch.
Connect the tablet/phone running ATAK to the Ethernet switch
Connect the Ethernet switch to the GCS
Power the Ethernet switch
AMC Settings
Select
 -> Settings -> General.
-> Settings -> General.Scroll down to Team Awareness (Smartphone Integration) section.
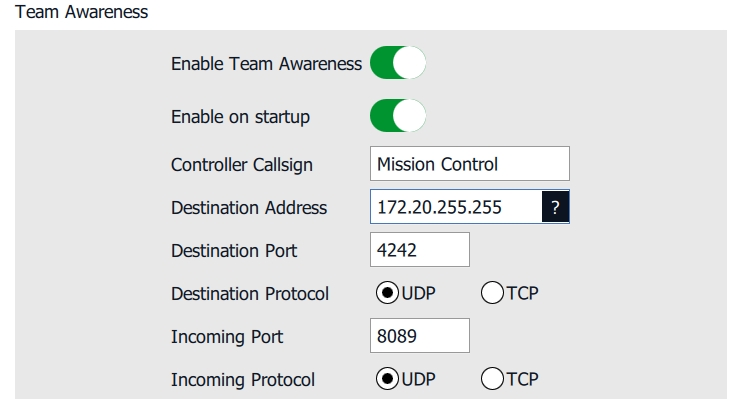
Turn on Enable Team Awareness and Enable on startup. In Fly View, the Team icon will be highlighted in blue, indicating that ATAK functionality is enabled.
Set Controller Callsign to Mission Control.
Set Destination Address to 172.20.255.255.
Set Destination Port to 4242.
Set Destination Protocol to UDP.
Set Incoming Port to 8089.
Set Incoming Protocol to UDP.
ATAK Settings
Click on the three dots on the top right. A menu will open.
Choose Settings -> Network Connections. Click on Network Connections in the pop-up window.
Go to the Input/Output Management section and click on Manage Inputs.
Edit the default connection (click on the pencil icon) and set the address to 0.0.0.0.
Tick the advanced options.
Select Input Protocol to UDP.
Set Server Port to 4242.
Confirm changes.
The checkbox next to the default entry must be checked.
Go back to Input/Output Management. Click on Manage Outputs.
Click on the three dots in the top right and select Add.
Set name to AMC.
Set address to the IP address of the GCS.
Tick the advanced options.
Select Input Protocol to UDP.
Set Server Port to 8089.
Confirm changes.
The checkbox next to the AMC entry must be checked.
Video Settings
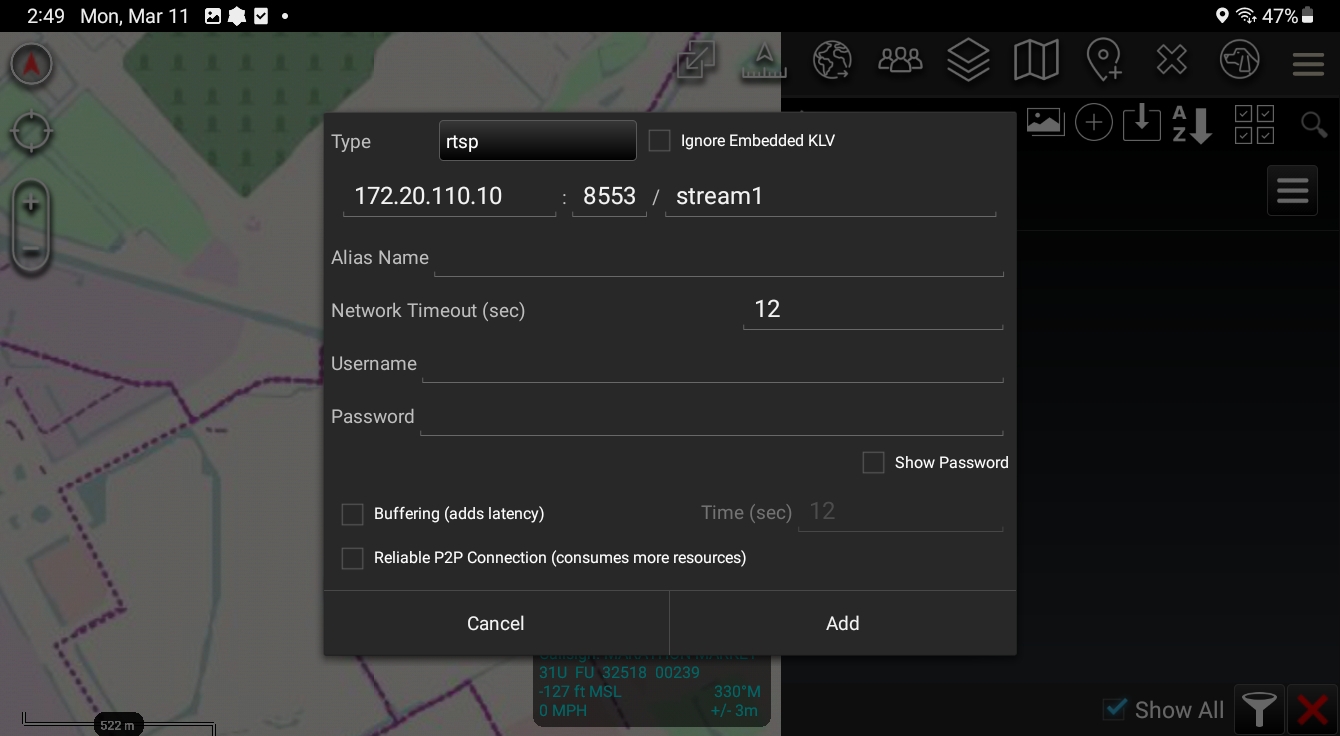
Click on the video symbol in the top toolbar. Click on the + in the menu.
Change Type to rtsp in the popup window.
Add 172.20.110.10:8553/stream1
Optionally: Stream can be named (e.g. "Vehicle 1")
Click on Add. The stream will appear in the left menu.
Using ATAK with Vehicle
Make sure to go through AMC-Settings, ATAK-Settings and Video-Settings first.
Connect the vehicle to AMC.
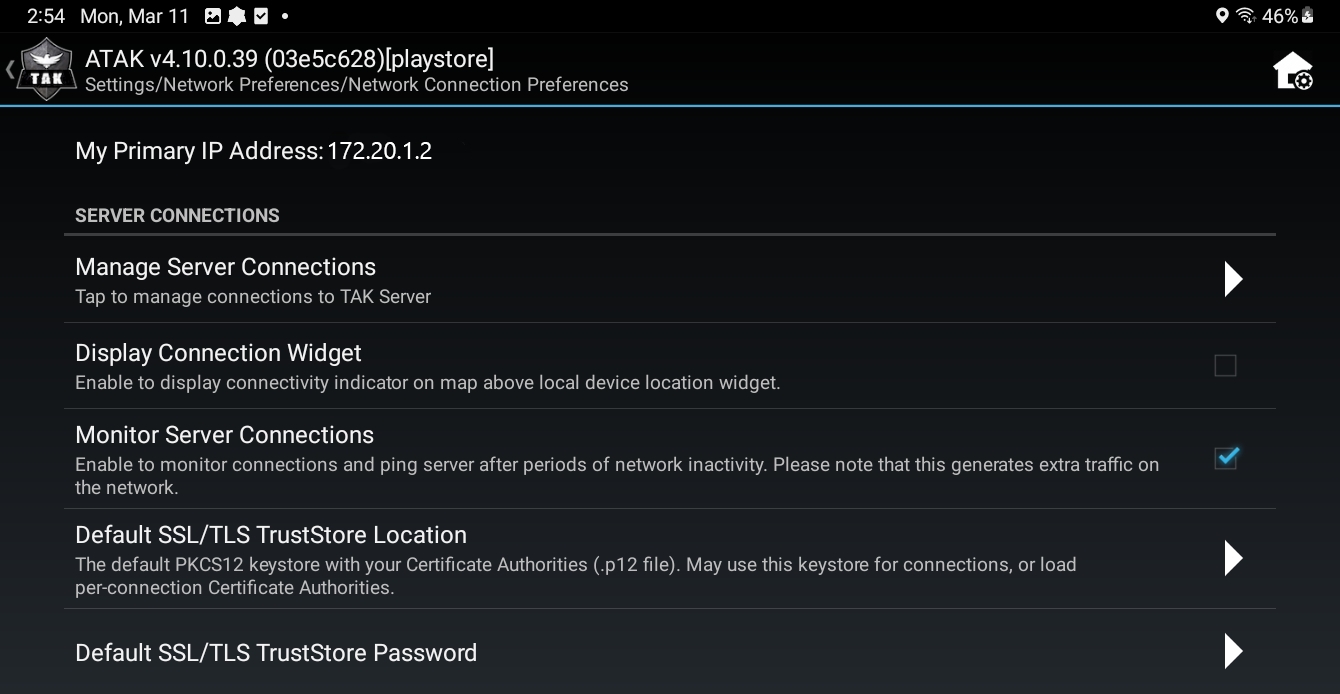
In ATAK, click on the three dots in the top right. A menu will appear. Click on Settings and then Network Connections. A popup will appear. Click on Network Connections. Check that the Primary IP Address is in the range 172.20.XX.XX.
If the Primary IP Address is in a different range, disconnect from the WiFi or cellular network.
As soon as the vehicle has GPS lock, the position as well as the sensor point of interest will appear on the map.
If the vehicle is on the ground, the sensor point of interest may not be visible.
Click on the video icon and select the stream previously configured in the ATAK configuration.
Markers
Select the marker icon in the ATAK top toolbar.
A menu with four different markers will appear on the right side.
Select the desired marker and click on the map to place the marker.
Click on send in the bottom right menu. You can either send the marker to a particular device or broadcast it.
The markers will appear on the map in AMC (Fly View only).
Safety Features
This chapter covers the flight controller's safety features.
Safety Features Index
Modifying the Safety Features
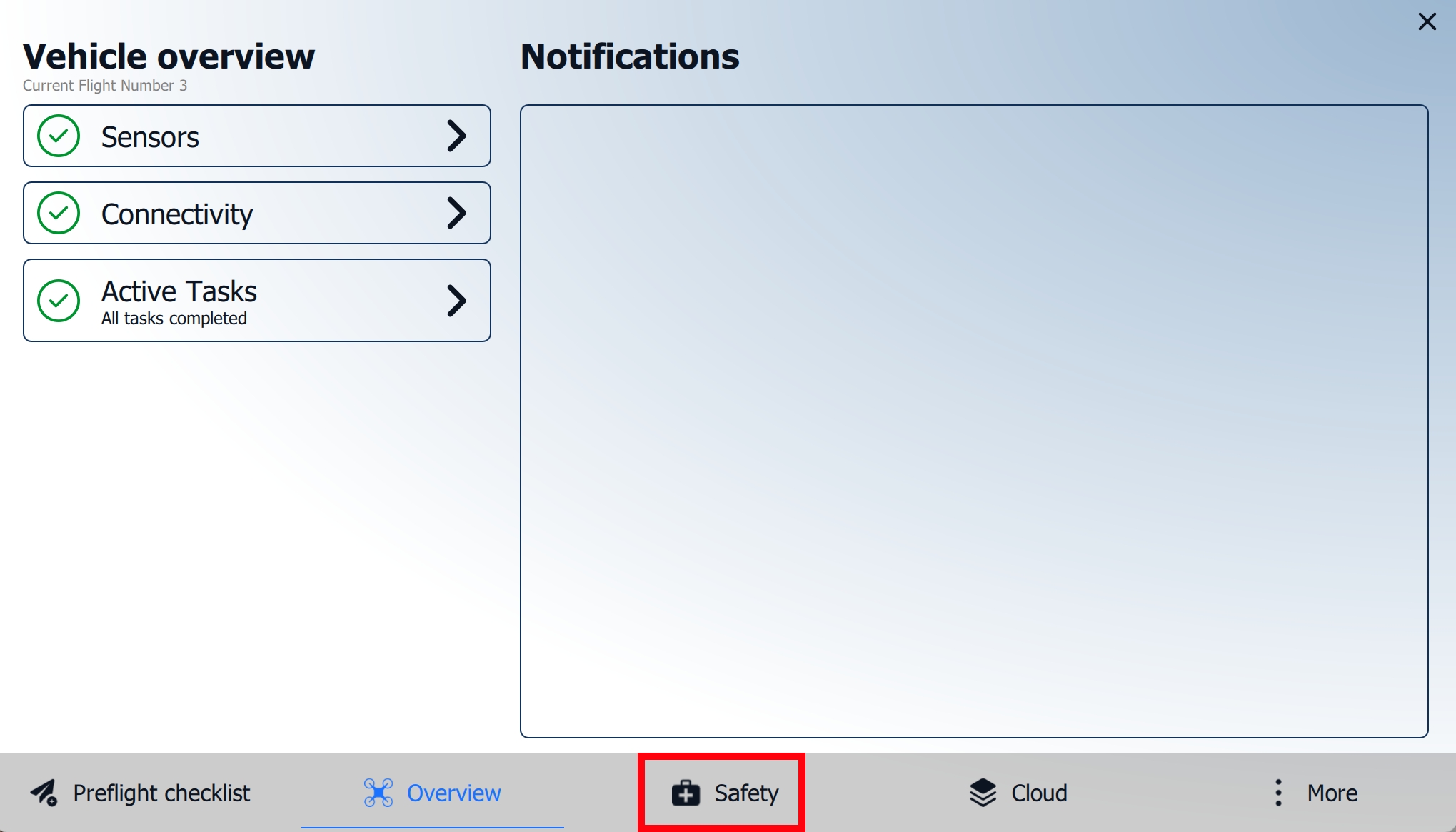
To modify the parameters click on the Vehicle Status icon in the upper left corner of Auterion Mission Control (AMC).

The Vehicle Overview screen will open. Click on Safety at the bottom of the screen. The Safety screen will open.
Return to Home Settings
This section covers the Return to Home settings.
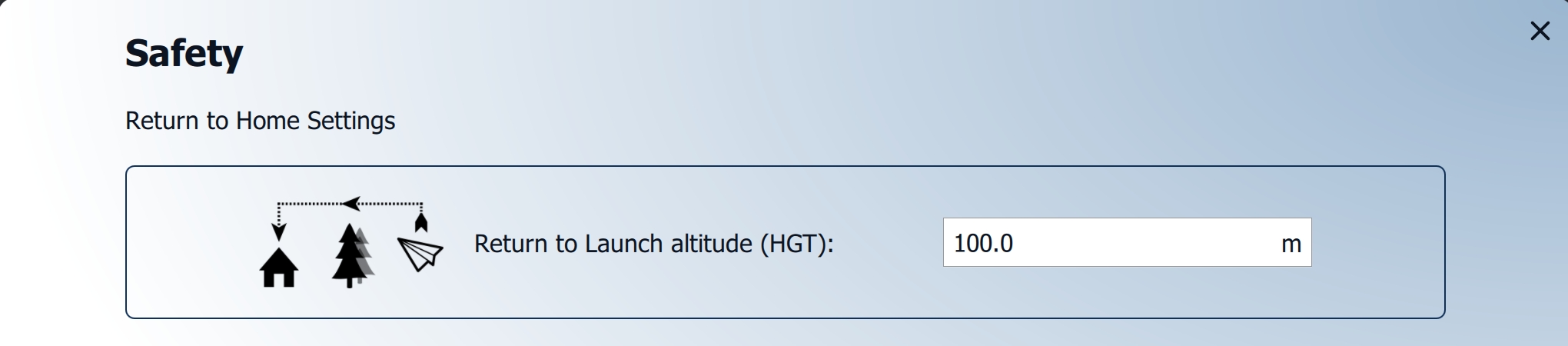
Return to Launch altitude (HGT) is the predetermined minimum height at which the DeltaQuad Evo will ascend to when initiating a return-to-launch (RTL) procedure. This altitude ensures the vehicle clears obstacles and maintains safe separation from the ground while returning to its landing location.
Default: 100 m
The Return to Launch altitude value should be set at least 25 meters above the highest obstacle in the mission area. If the vehicle is below this altitude when an RTL command is triggered, it will climb to the set altitude and then proceed to return. If the vehicle is already above the set altitude, it will continue at its current altitude.
The Return to Launch altitude is referenced to the takeoff location (HGT), not above ground level (AGL). Special care must be taken when operating in an area with varying ground elevations.
When an RTL command is triggered, the DeltaQuad Evo will return in a straight line to the designated landing location. Therefore, the vehicle must be capable of flying directly back to the landing point from any point in the mission or flight path.
Low Battery Failsafe Trigger
This section covers the Low Battery Failsafe Trigger settings.
It is recommended to leave these settings unchanged.
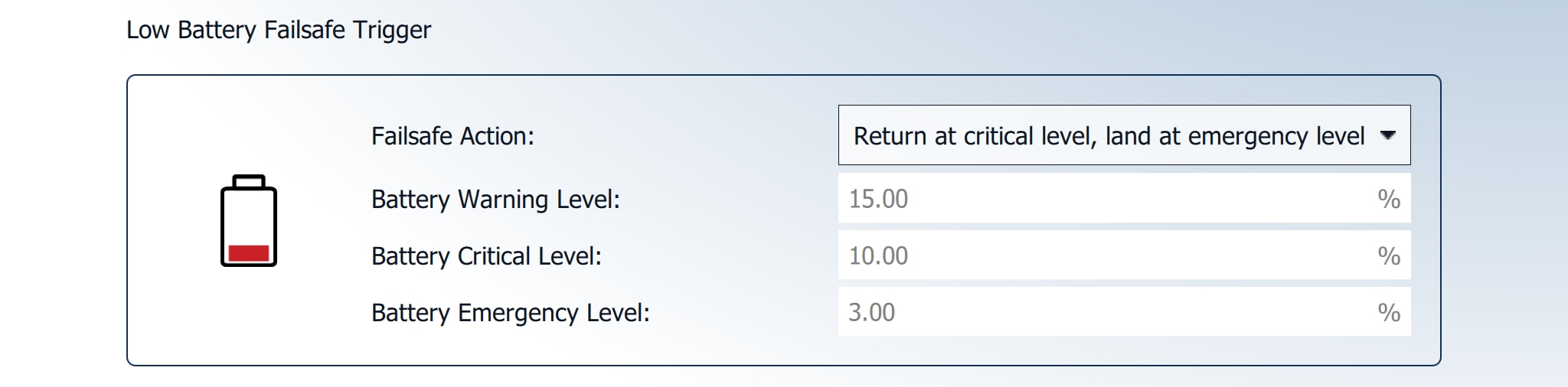
The Low Battery Failsafe Trigger defines what the vehicle does when reaching low battery levels.
Default Failsafe Action: Return at critical level, land at emergency level
Default Battery Warning Level: 15%
Default Battery Critical Level: 10%
Default Emergency Level: 3%
The following Failsafe Actions are available:
Failsafe Action
Warning. Warn (notification only) if capacity drops below Battery Failsafe Level.
Return Mode. Return mode and warn if capacity drops below Battery Failsafe Level.
Land Mode. Land mode and warn if capacity drops below Battery Failsafe Level. (Only available in AMC's Advanced Mode.)
Return mode at critically low level, land mode at current position if reaching dangerously low levels. Triggers warning, return mode, and land mode at the respective levels.
Battery Warning Level: The percentage where the vehicle will give a visible and audible warning to the Ground Control Station (GCS).
Battery Critical Level: The level at which the vehicle is expected to have already returned to the landing site after the critical battery level action has been triggered.
Emergency Level: The level at which the vehicle initiates the emergency battery action (land).
The levels are those estimated to be reached when the vehicle has flown to the landing site. This means that the further the vehicle is from its intended landing location, the sooner these actions will be taken.
It is the operator's responsibility to plan missions in a way that ensures the vehicle has sufficient energy reserves to return to the landing site. The Low Battery Failsafe Actions serve as the final safety measure, and all necessary precautions should be taken by the operator to prevent these actions from being triggered.
If the Default Emergency Level action is triggered, no warranty claims will be accepted for any resulting damages or issues.
Data Link Loss Failsafe Trigger
This section covers the Data Link Loss Failsafe Trigger settings.

The Data Link Loss Failsafe Trigger controls the behavior of the vehicle when the telemetry link is lost.
Default Failsafe Action: Return mode
Default Data Link Loss Timeout: 60s
Failsafe detection can trigger one of the following actions.
Disabled
No action (the failsafe will be ignored).
Hold mode*
The vehicle will enter Hold mode and orbit at the location where the failsafe action was triggered.
Return mode
The vehicle will enter Return mode and fly directly to the designated landing location at the set return altitude, then land.
Land mode*
The vehicle will enter Land mode and land immediately.
Terminate*
Turns off all controllers and sets all PWM outputs to their failsafe values. The failsafe outputs can be used to deploy a parachute, landing gear, or perform another operation.
Lockdown*
Kills the motors (sets them to disarmed).
(*only available in AMC's Advanced Mode)
By default, when a loss of communication occurs, the DeltaQuad Evo Tactical will continue its mission if a mission plan is being executed.
This behavior is inherent to the Evo Tactical, as a loss of communication is expected during missions with the stealth switch enabled.
The settings for the Data Link Loss Failsafe Trigger should be checked before pausing the vehicle mid-flight.
If the trigger is disabled and the data link is lost while the vehicle is paused and in Hold mode, the pilot will be unable to issue new commands. The DeltaQuad EVO will remain in Hold mode until the data link is re-established. If the data link cannot be restored, the vehicle will remain in Hold mode until the Low Battery Failsafe Trigger activates.
RC Loss Failsafe Trigger (Advanced Mode)
This section covers the RC Loss Failsafe Trigger settings.
This setting can be ignored. The RC Loss Failsafe Trigger can remain unchanged, as the DeltaQuad Evo GOV uses only a virtual RC link, not a physical one.
To configure the Failsafe Action for a loss of communication, the appropriate actions must be selected for the Data Loss Failsafe Trigger.

The RC Link Loss Failsafe Trigger controls the behavior of the vehicle when the RC link is lost.
Default Failsafe Action: Return mode
Default RC Loss Timeout: 5 s
High Wind Failsafe Trigger
This section covers the High Wind Failsafe Trigger settings.

The High Wind Failsafe Trigger is a safety feature that activates when the vehicle detects wind speeds exceeding 14 m/s. When triggered, it initiates a predefined action, such as returning to home or landing, to prevent the vehicle from being adversely affected by high winds.
Default Failsafe Action: Return
Failsafe detection can trigger one of the following actions.
Disabled
No action (the failsafe will be ignored).
Return mode
The vehicle will enter Return mode and fly directly to the designated landing location at the set return altitude, then land.
Land mode*
The vehicle will enter Land mode and land immediately.
(*only available in AMC's Advanced Mode)
Geofence Failsafe Trigger
This section covers the Geofence Failsafe Trigger settings.
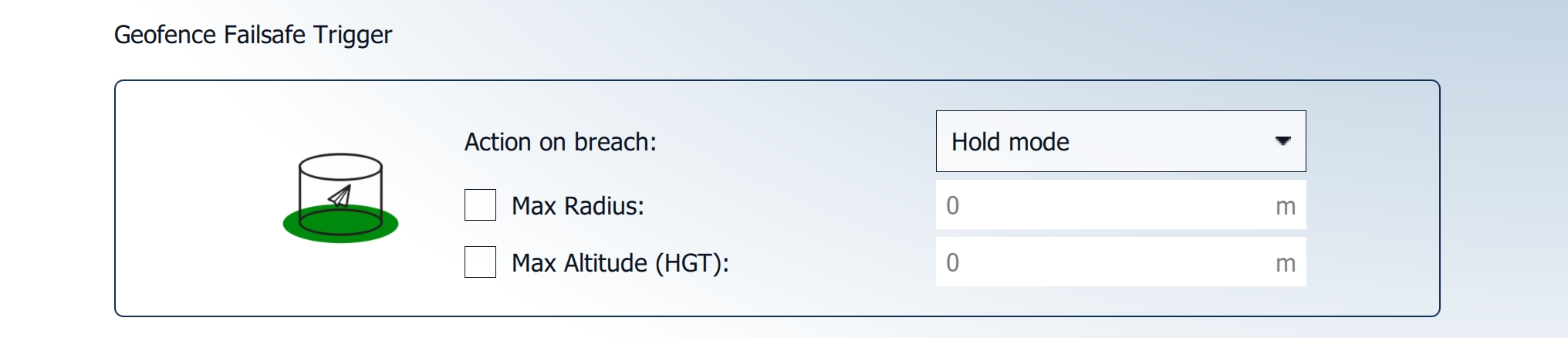
The Geofence Failsafe Trigger can be set to limit the vehicle's radius and/or altitude. When these parameters are breached, the vehicle will perform the defined action.
Default Action on breach: Hold mode
Default Max Radius: Disabled
Default Max Altitude (HGT): Disabled
Failsafe detection can trigger one of the following actions.
None
No action
Warning
A warning message will be displayed/announced.
Hold mode
The vehicle will enter Hold mode and orbit at the location and altitude where the failsafe action was triggered.
Return mode
The vehicle will enter Return mode and fly directly to the designated landing location at the set return altitude, then land.
Terminate*
Turns off all controllers and sets all PWM outputs to their failsafe values. The failsafe outputs can be used to deploy a parachute, landing gear, or perform another operation.
Land mode*
The vehicle will enter Land mode and land immediately.
Max Radius
The horizontal radius of the geofence cylinder around the Home Position. Alternatively, a circle can be drawn and freely positioned in the Plan View. The horizontal geofence is disabled if set to 0.
Max Altitude
Height of geofence cylinder. Altitude geofence disabled if 0.
(*only available in AMC's Advanced Mode)
The Max Altitude is referenced to the takeoff location (HGT), not above ground level (AGL). Special care must be taken when operating in an area with varying ground elevations.
Land Mode Settings (Advanced Mode)
This section covers the Land Mode Settings.
It is recommended to leave these settings unchanged.

The Land Mode Settings control the landing behavior of the DeltaQuad Evo.
Default Landing Descent Rate: 0.6 m/s
Default Disarm After: 2 s (enabled)
Air Unit Radio Swap
This chapter explains how to swap the radio air units in the DeltaQuad Evo.
Tools needed - Torx 10 (T10)

Threadlocker (medium strength)
Preparation
Find a flat surface like a table big enough to fit the DeltaQuad Evo's fuselage.
Take the fuselage of the DeltaQuad Evo out of the flight case.
Put the fuselage on its landing gear on the table.
Remove the hatch.
Changing the Pusher Motor Pod
Remove the two top screws of the avionics bay hatch.


Slightly lift the avionics bay and pull it forward.


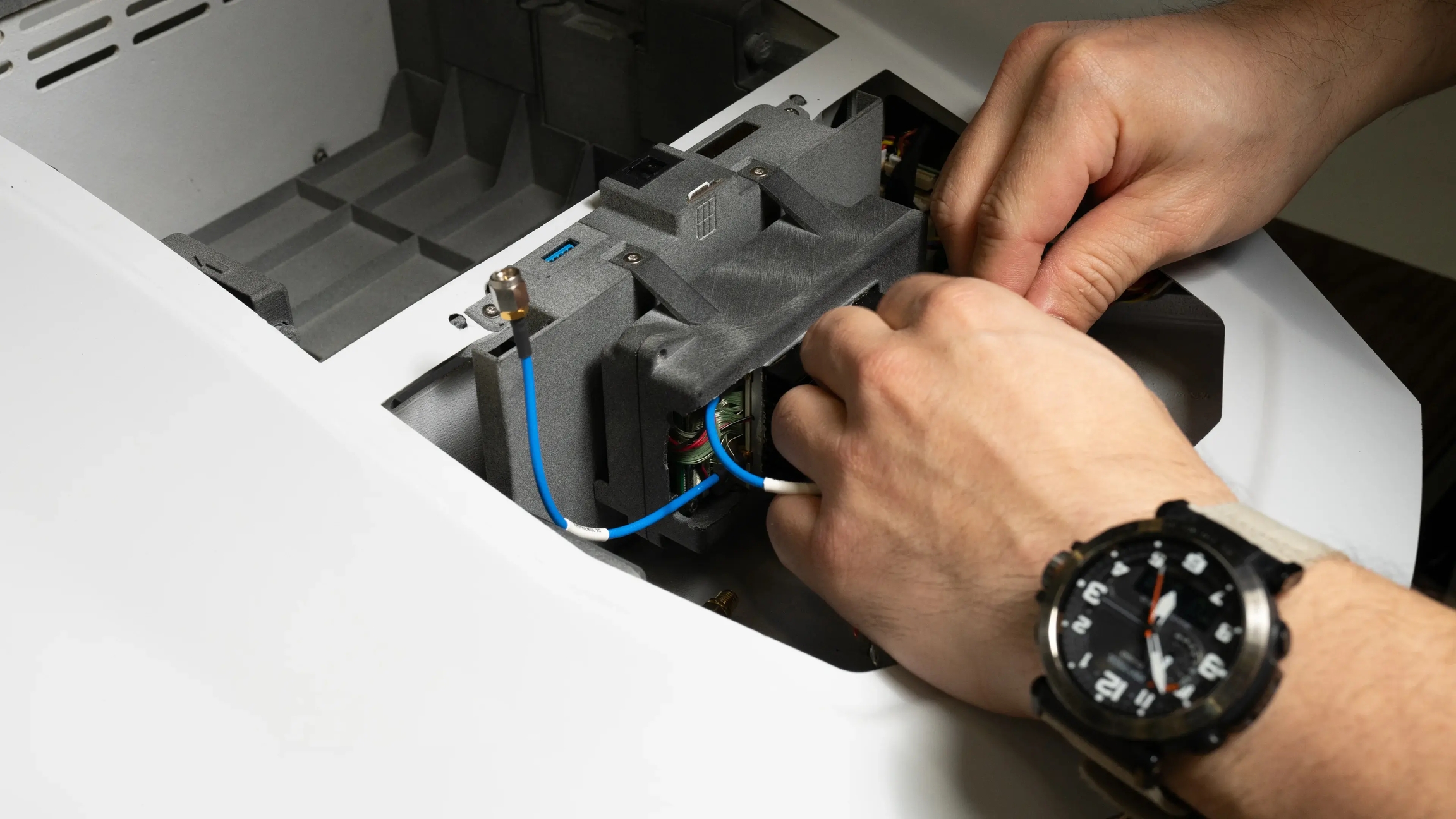
The air unit is installed at the back of the Flight Management Unit (FMU). First, detach the two SMA antenna cables by unscrewing the SMA plugs."
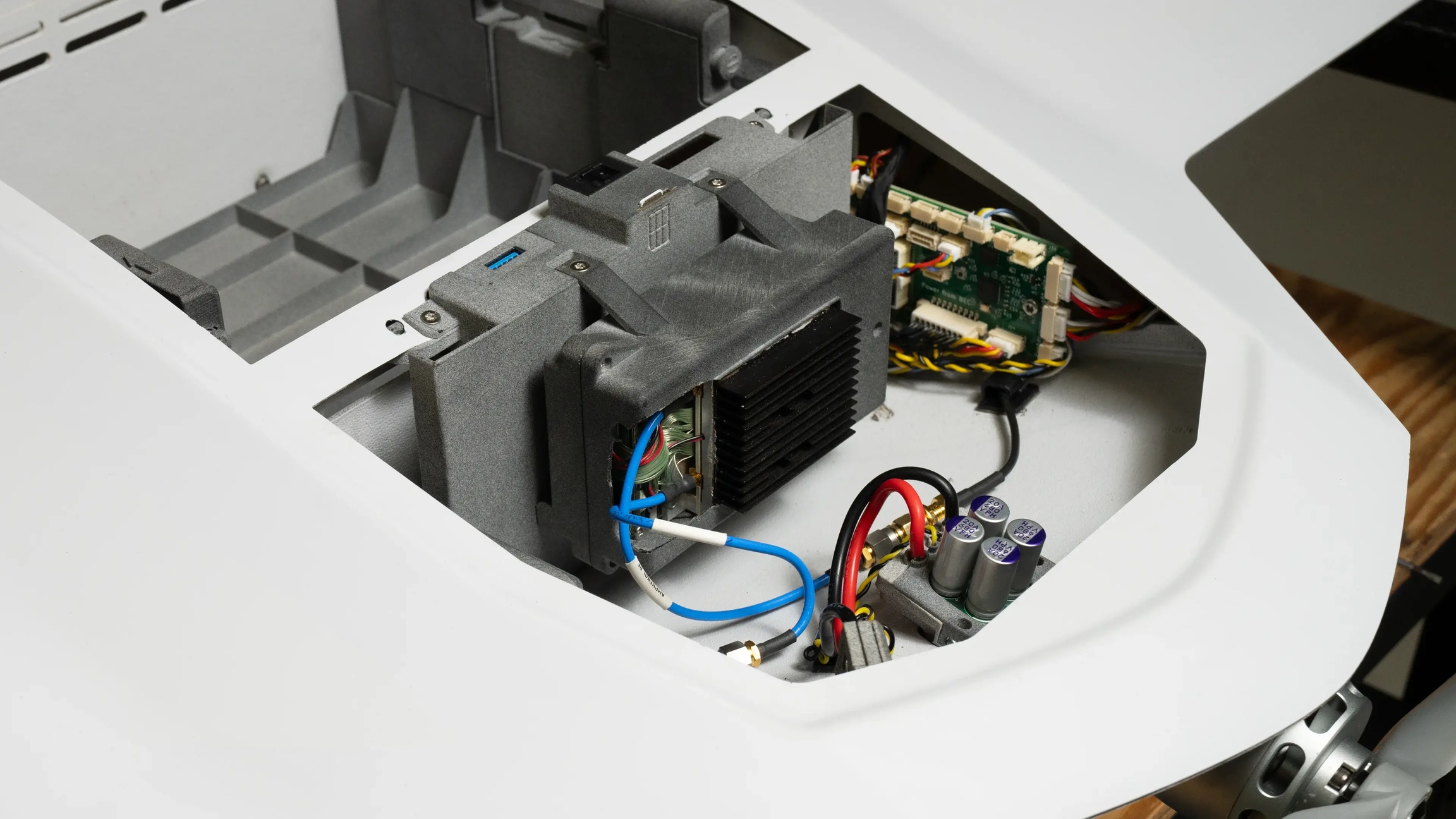
Loosen the two screws attaching the air unit to the FMU.
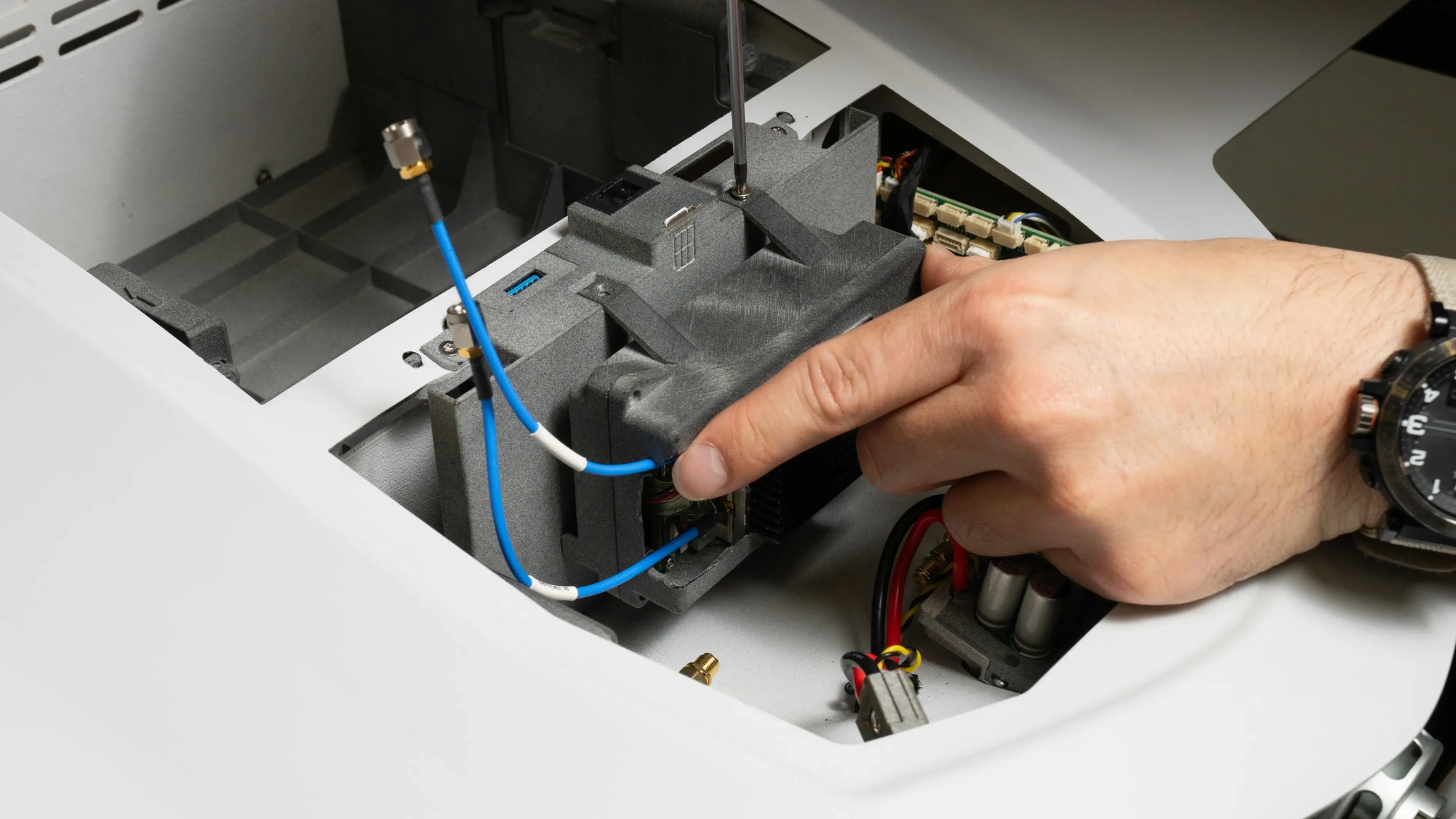
Detach the air unit from the FMU by pulling it upwards. At the bottom of the air unit is a connector that fits into the corresponding connector on the FMU.
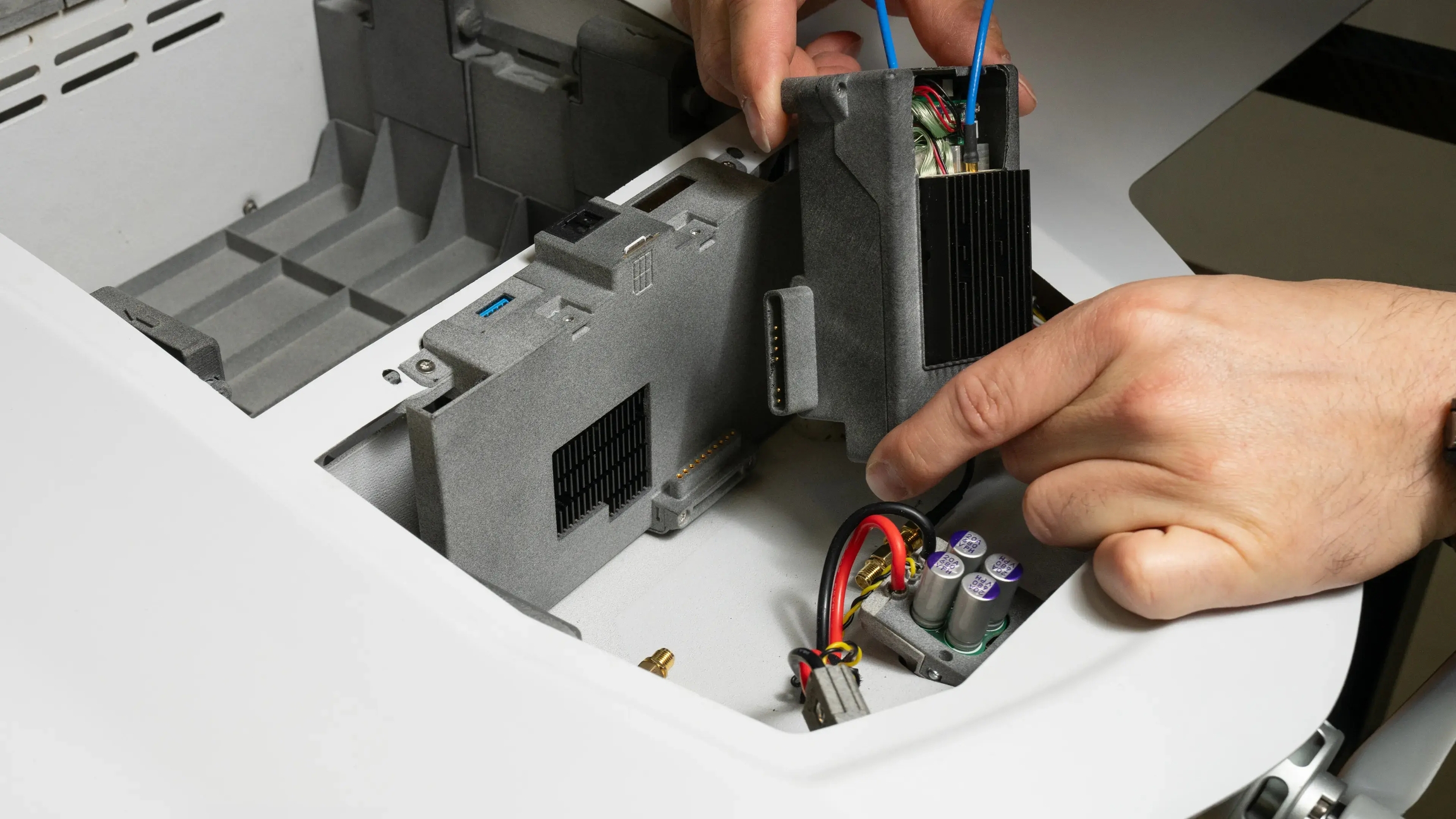

Install the new air unit by following the steps above in reverse order. Connect the new air unit to the FMU by sliding it downwards onto the FMU. Reconnect the two SMA antenna connectors.

Install the two screws on top of the air unit and apply threadlocker to the tip of each screw.

To install the avionics bay hatch, catch and align its clamps with the rear edge of the avionics bay. Follow step 2 in reverse order to achieve this.
Close the avionics bay by tightening the two top screws. Please use threadlocker for these screws.
The new radio air unit is now installed. Double-check that all screws are snug but not overtightened to avoid any damage.
If you should encounter problems during the installation process please contact support@deltaquad.com for further assistance.
Connecting a Second GCS
This section explains how to connect a secondary GCS to the primary GCS.
You can connect a secondary GCS to the primary GCS using a Wi-Fi network, a hotspot, or a USB connection. A secondary GCS on-site is useful when both a camera operator and a pilot are needed.
Wi-Fi Connection - Prerequisites
DeltaQuad Evo and the GCS must be powered on.
A connection between the vehicle and GCS must be established.
A laptop or any other device with AMC installed.
The primary and secondary GCS must be connected to the same Wi-Fi network or hotspot.
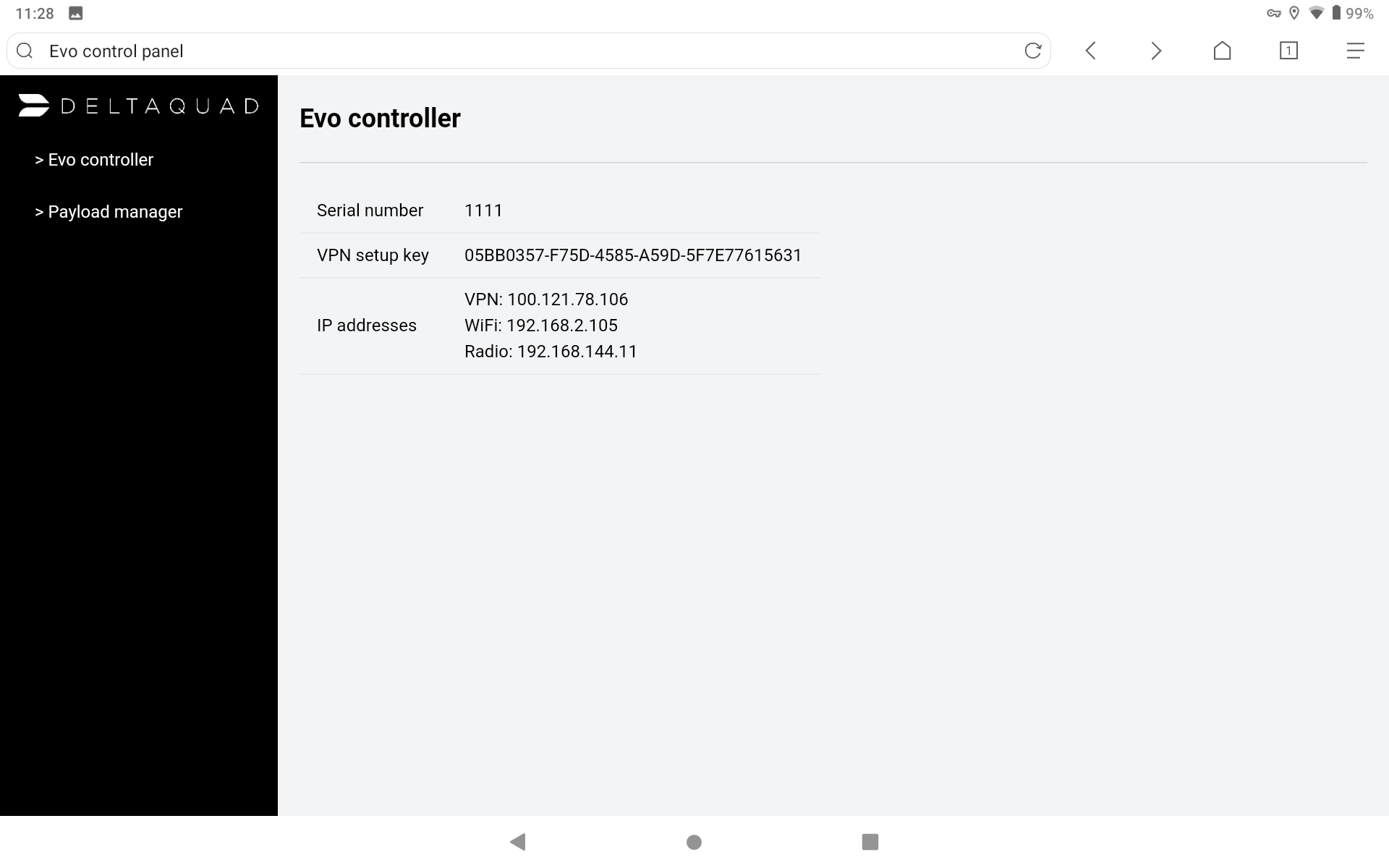
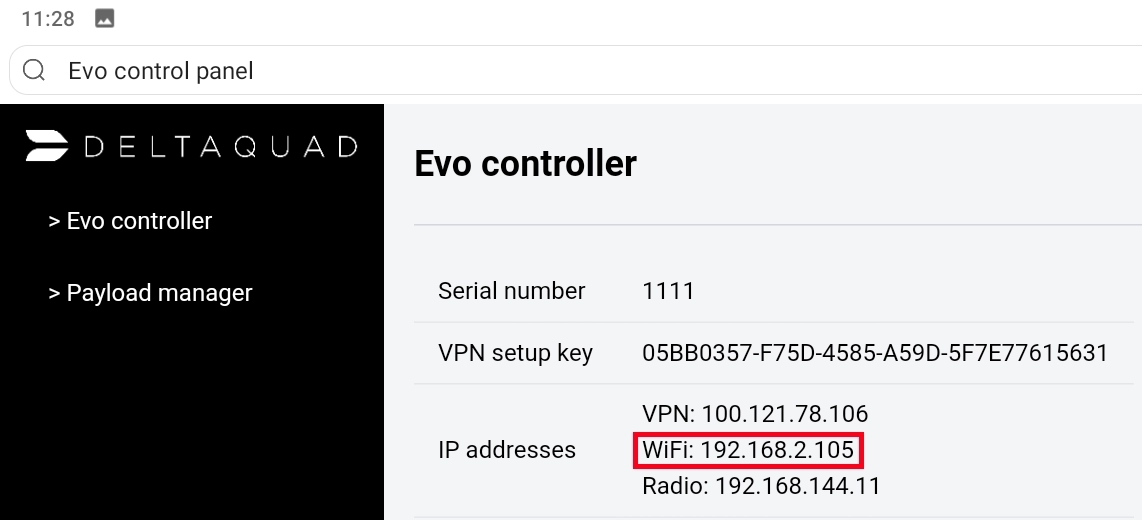
On the primary GCS, open the Evo Control Panel app located on the desktop.

The Evo Controller window will open. Copy the WiFi IP address—in our case, 192.168.2.105.
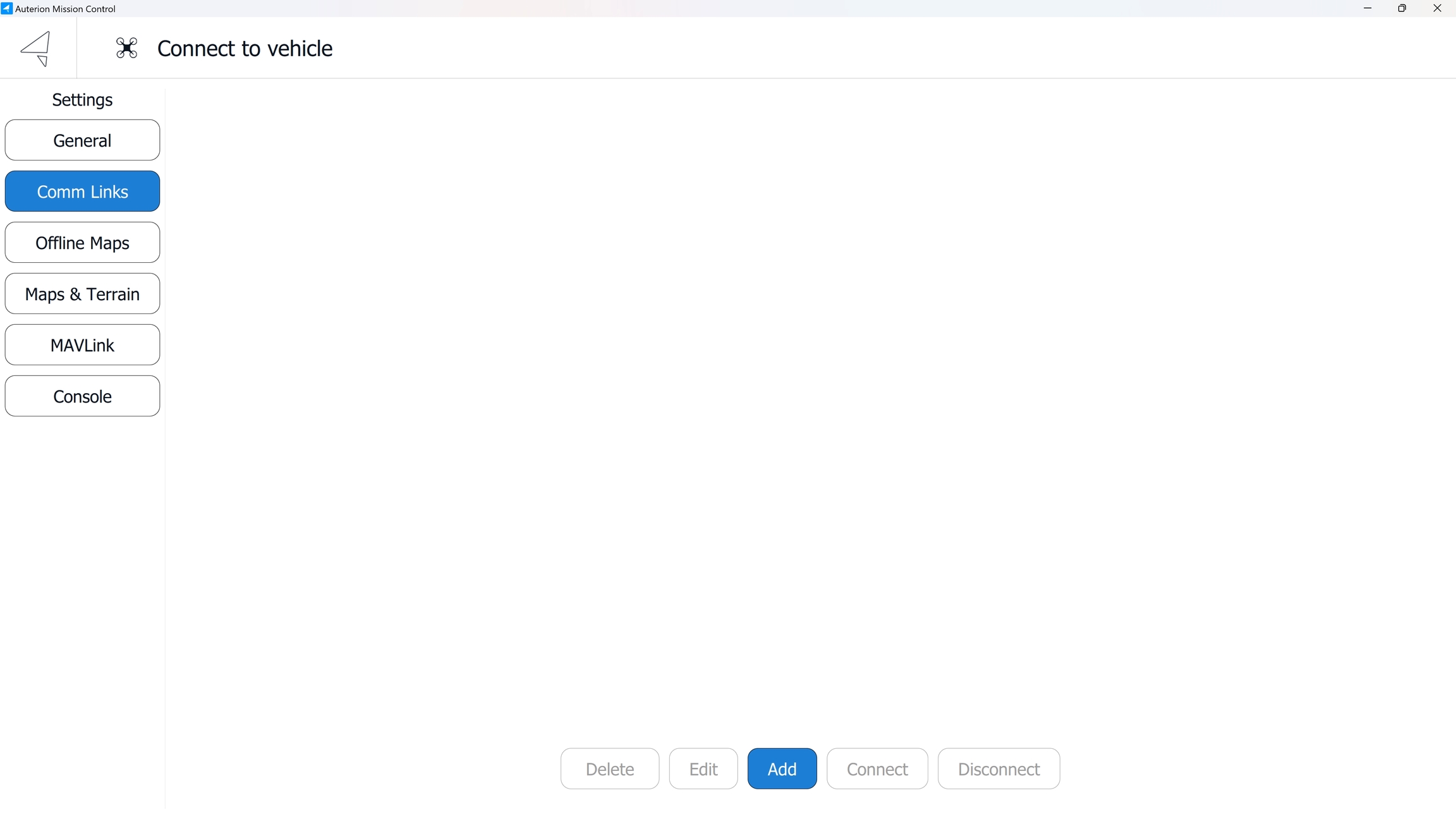
On the secondary GCS, open AMC. Navigate to AMC Menu > Settings > Comm Links. Click on Add.
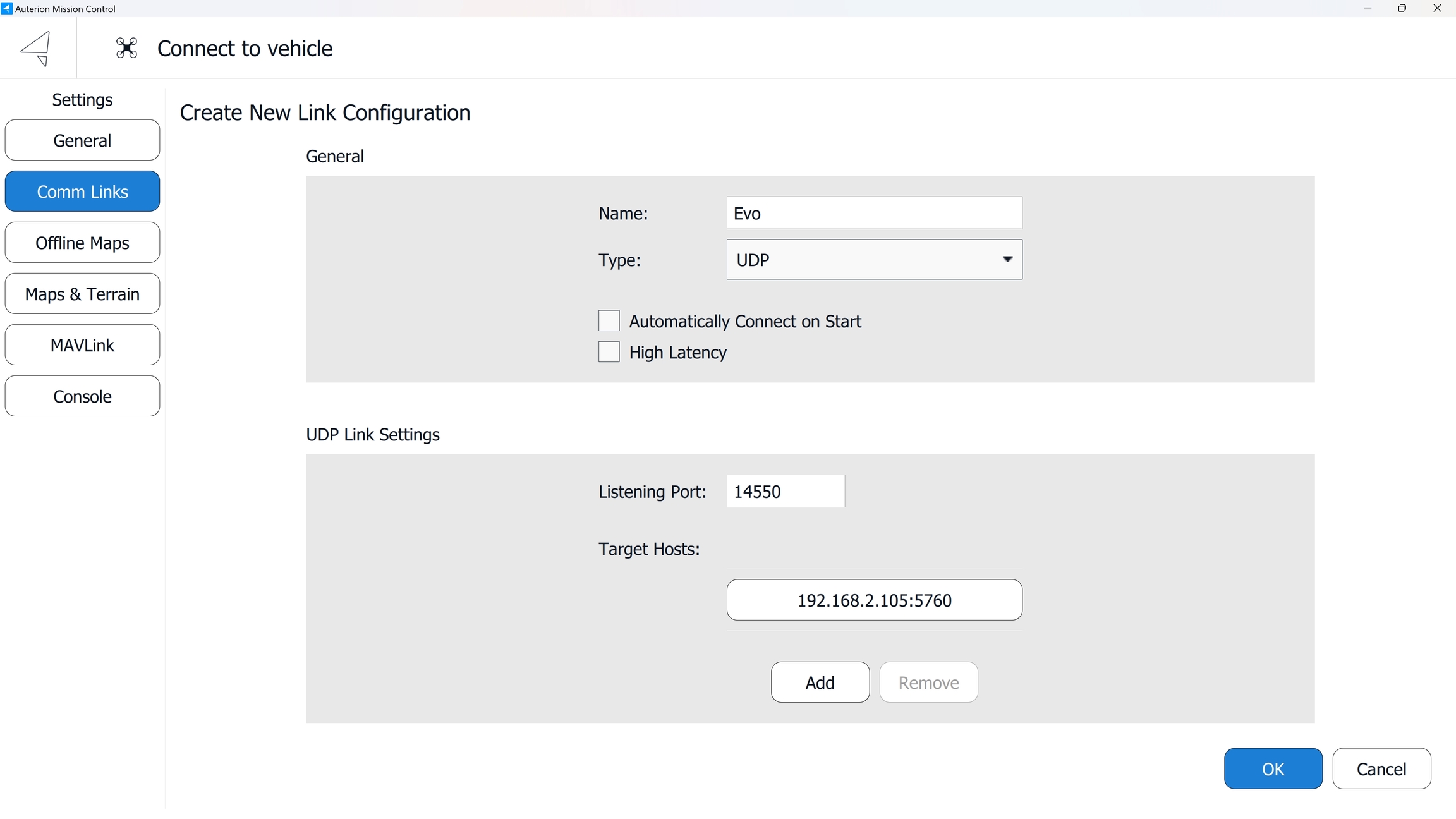
Enter the following items and click OK.
Name: Enter any name
Type: UDP
Listening Port: 14550
Target Host: <Wi-Fi IP adress>:5760
In our case 192.168.2.105:5760
Click on the newly created comm link and Connect.
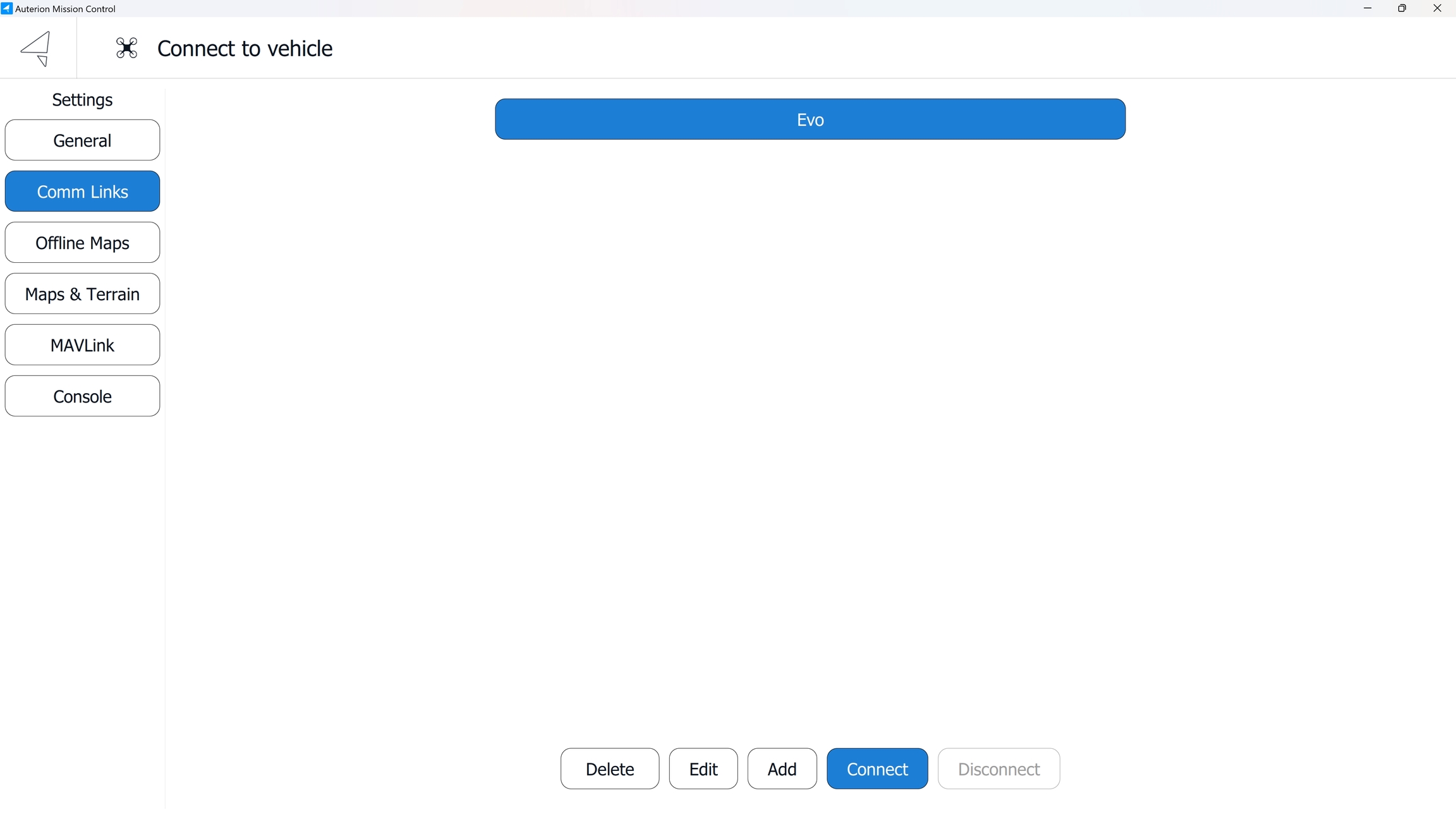
After a few seconds the secondary GCS connects to the primary GCS. The vehicle status should be indicated in the upper left corner of AMC.
USB Connection - Prerequisites
DeltaQuad Evo and the GCS must be powered on.
A connection between the vehicle and GCS must be established.
A laptop or any other device with AMC installed.
The primary and secondary GCS must be connected via a USB cable.
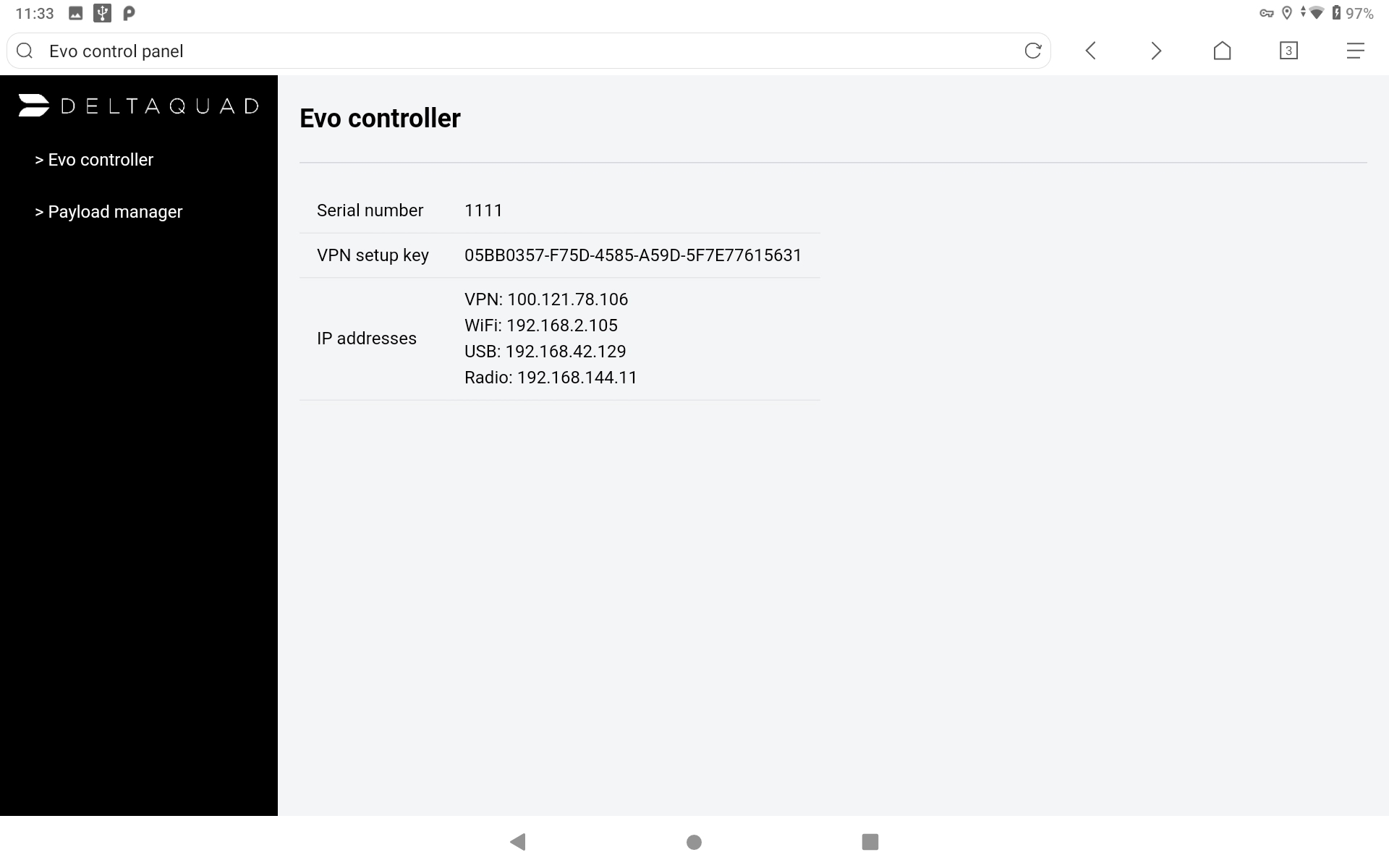
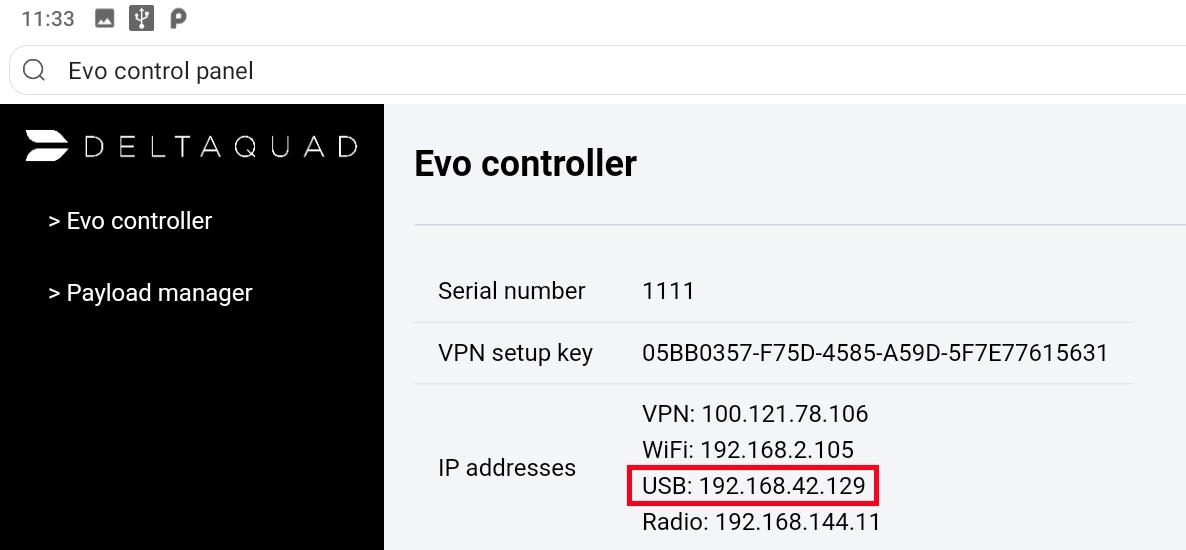
On the primary GCS, open the Evo Control Panel app located on the desktop.
The Evo Controller window will open. Copy the USB IP address—in our case, 192.168.42.129.
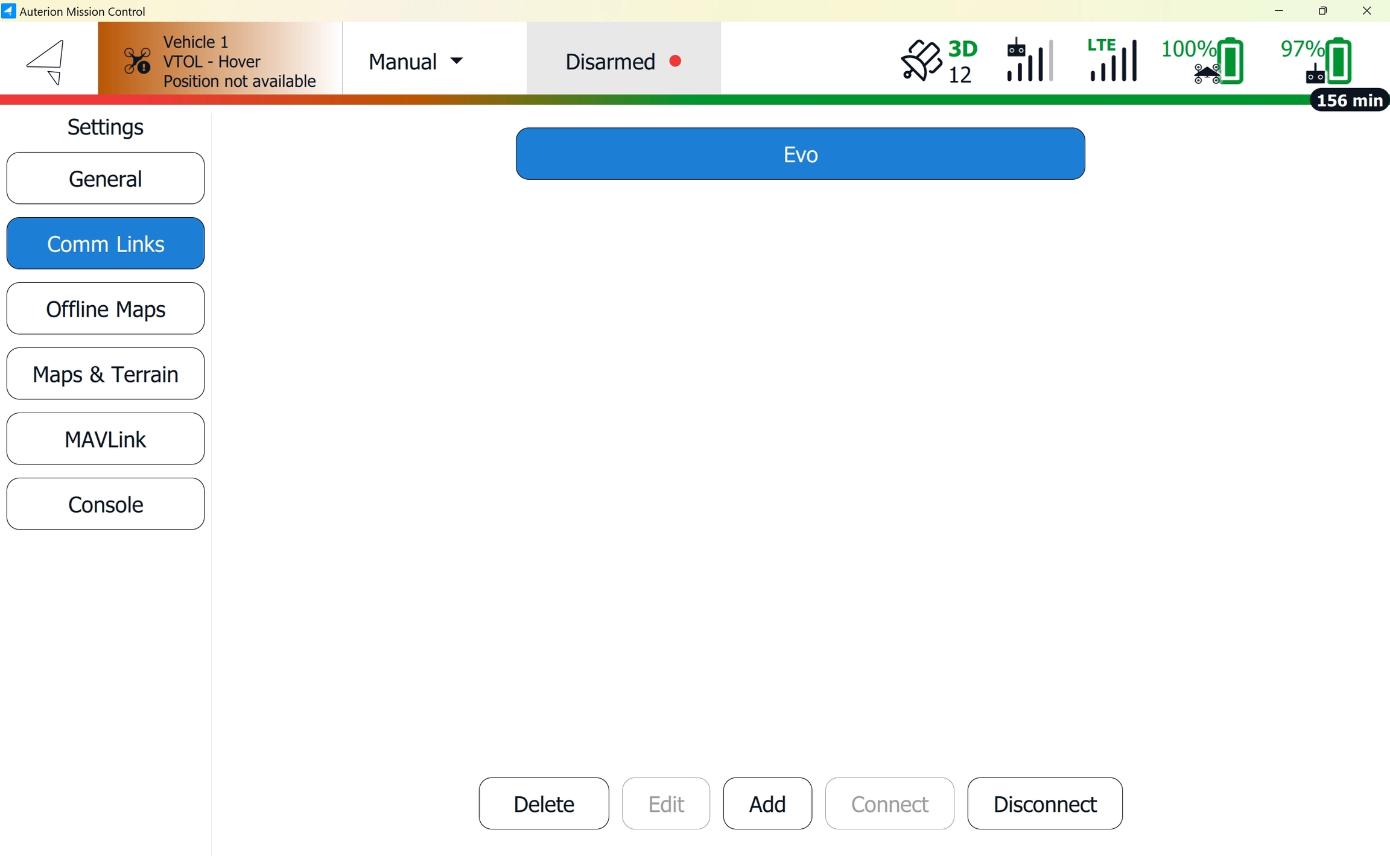
On the secondary GCS, open AMC. Navigate to AMC Menu > Settings > Comm Links. Click on Add.
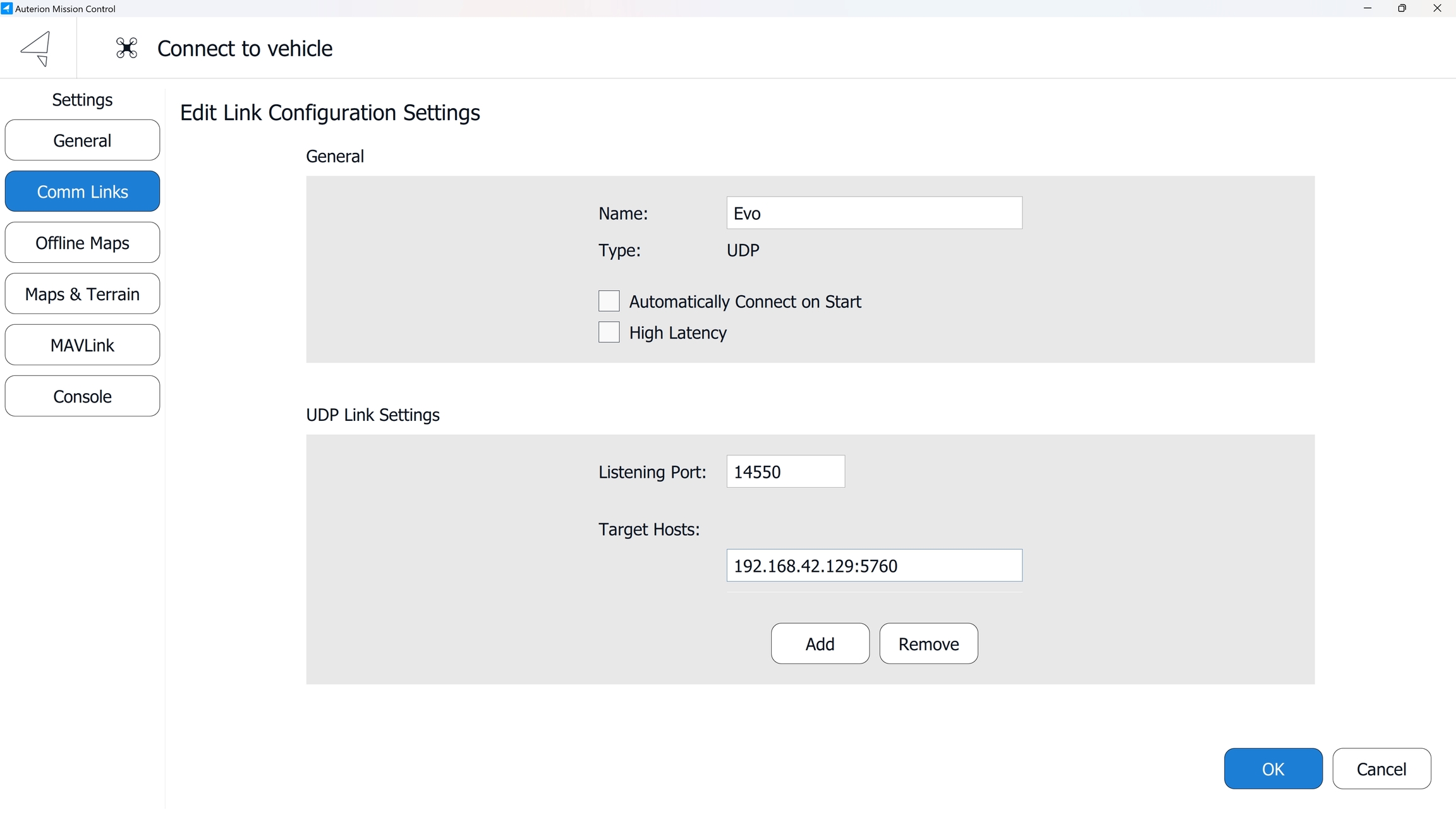
Enter the following items and click OK.
Name: Enter any name
Type: UDP
Listening Port: 14550
Target Host: <USB IP adress>:5760
In our case192.168.42.129:5760
Click on the newly created comm link and Connect.
After a few seconds the secondary GCS connects to the primary GCS. The vehicle status should be indicated in the upper left corner of AMC.
ADS-B Receiver
This section explains the purpose and functionality of the optional ADS-B receiver.
The DeltaQuad Evo Government and Stealth Edition can be optionally equipped with an ADS-B receiver.
This receiver detects signals from nearby aircraft equipped with ADS-B (Automatic Dependent Surveillance-Broadcast) transmitters. By doing so, the DeltaQuad Evo operator gains awareness of surrounding air traffic, enhancing situational awareness and safety while helping to avoid potential collisions.
No further steps are needed if an ADS-B receiver is installed in your DeltaQuad Evo. The receiver is active by default, allowing it to receive broadcasts from nearby aircraft.